XiaoMi-AI文件搜索系统
World File Search System时间差

使用深度预期的SARSA和非线性时间差学习
摘要 - 在本文中,我们使用原始加固学习(RL)方法提出了一种基于学习的非线性模型预测控制器(NMPC),以学习NMPC方案的最佳权重。控制器用作深度预期SARSA的当前动作值函数,其中通常用次级NMPC获得的后续动作值函数与神经网络(NN)近似。在现有方法方面,我们添加了NN的输入NMPC学习参数的当前值,以便网络能够近似行动值函数并稳定学习性能。另外,在使用NN的情况下,实时计算负担大约减半而不会影响闭环性能。此外,我们将梯度时间差异方法与参数化的NMPC结合在一起,作为预期的SARSA RL方法的函数近似函数,以克服函数近似中存在非线性时克服潜在参数的差异和不稳定性问题。仿真结果表明,所提出的方法在没有不稳定性问题的情况下收敛到本地最佳解决方案。


从新冠病毒研究到疫苗应用
人们常说,医学研究从实验室走向临床需要 17 年的时间。在冠状病毒疾病 (COVID-19) 的世界里,这样的时间差让人难以忍受。在这种特殊情况下,几年的时间能缩短到几个月吗?如果是这样,当危机缓解时,这些经验教训可以用来加速医学研究吗?为了衡量卫生和生物医学研究中的时间差以及找出减少时间差的方法,我们开发并发布了 (2015 年) 一个矩阵,该矩阵由从发现研究到开发产品、政策和实践的转化过程中的重叠轨道 (或阶段/阶段) 组成。该矩阵通过强调开发研究 (及其转化) 所需的时间和行动来帮助分析,包括 (1) 沿着每条轨道和 (2) 从一个轨道到另一个轨道,例如从发现轨道到人体研究轨道。我们指出了减少时间差的四种主要方法,即增加资源、并行工作、开始或冒着风险工作以及改进流程。将这些方法与矩阵一起研究有助于解释全球为开发 2019 年新型冠状病毒 SARS-CoV-2(COVID-19 的病原体)疫苗所付出的巨大努力。通过大规模资助、并行开展工作(全球不同团队之间以及通过重叠轨道开展工作)、承担比平时更大(但成比例)的安全风险以及采用各种新流程,发现/基础和人体研究轨道正在迅速取得进展。一些团队的重叠工作包括继续进行动物研究,同时将候选疫苗纳入 I 期试验,同时规划其 II 期试验。可用的额外资金有助于降低如此快速行动带来的一些常见财务风险。随着安全性、剂量和功效的人体试验规模越来越大,在通常具有挑战性的公共政策和临床轨道上并行开展工作将至关重要。因此,监管机构和报销机构正在开始并准备迅速采取行动,将证明安全有效的疫苗快速应用于普通人群。使用该矩阵(根据需要进行修改)监测 COVID-19 疫苗的开发,有助于确定哪些加快开发和部署的方法可以在未来得到更广泛的应用。
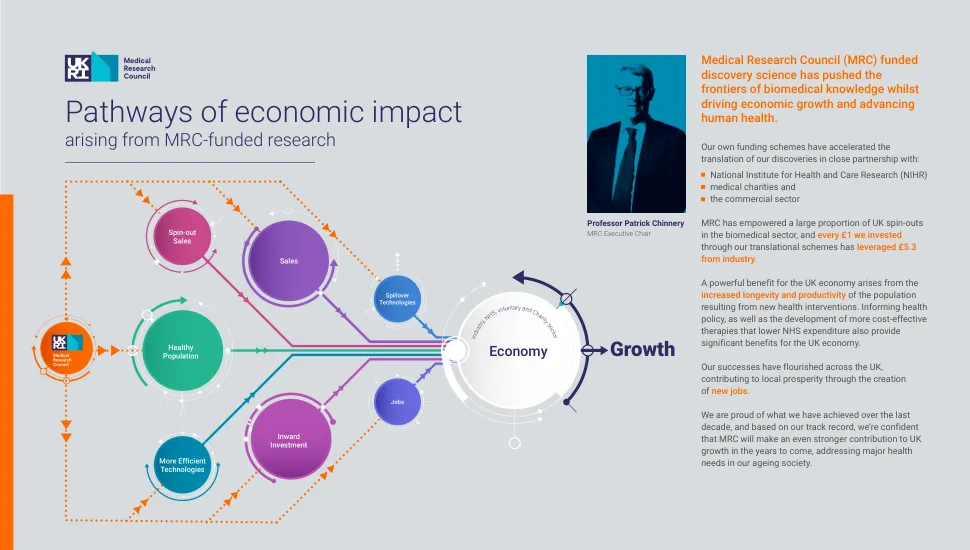
241115 MRC 经济影响 7a
虽然自 2008 年以来,MRC 资助研究项目不断涌现,并获得了大量投资,这显示出未来将产生巨大经济影响,但突破与临床之间的时间差意味着利润尚未实现。2008 年之前的分拆项目表明,研究突破以及英国公司的增长及其创造的就业机会可以产生销售影响。
2.1 经济增长 - 宏观经济学主题 2
借贷减少储蓄的动力,因此支出和投资增加。但是,利率变化和 AD 上升之间存在时间差,因此如果需要立即提高 AD,则不适用。o 降低税收意味着消费者有更多的可支配收入,因此 AD 上升。o 政府支出增加将促进 AD。o 货币贬值意味着 M 更贵,而 X 更便宜,因此
实验室手册
步骤 1:启动进程步骤 2:接受就绪队列中的进程数和时间段(或)时间片步骤 3:为就绪 Q 中的每个进程分配进程 ID 并接受 CPU 突发时间步骤 4:计算每个进程的时间片数,其中进程(n)的时间片数 = 突发时间进程(n)/时间片步骤 5:如果突发时间小于时间片,则时间片数 =1。步骤 6:假设就绪队列为循环 Q,计算进程(n)的等待时间 = 进程(n-1)的等待时间 + 进程(n-1)的突发时间 + 从进程(n-1)获取 CPU 的时间差(a)进程(n)的周转时间 = 进程(n)的等待时间 + 进程(n)的突发时间 + 从进程(n)获取 CPU 的时间差。步骤 7:计算(a)平均等待时间 = 总等待时间/进程数(b)平均周转时间 = 总周转时间/进程数步骤 8:停止进程 1.1.3 程序:
军事空中交通管制 (MATC) - Indra
多点定位和广域多点定位 (MLAT / WAM) Indra MLAT/WAM 是一种高精度解决方案,适用于跑道监控期间的空中监视和地面监视。该系统由一系列分布式站点组成,这些站点收集从飞机接收到的 SIF / SSR 信号的到达时间差,以确定其 3D 位置。Indra MLAT 传感器是市场上最精确的传感器,同步精度优于 1ns。此外,站点的分布可在地形限制雷达覆盖的区域提供监视,并且是一种可扩展的解决方案,可实现灵活高效的升级。

产品目录 - PIT-RADWAR
在系统模式下,PRP-25M 为 2÷3 个 PRP-25S 从站执行主站功能,即主站管理从站操作,收集和处理从站记录的数据以制定识别解决方案。PRP-25S 从站检测和处理侦察数据,然后将其与主 PRP-25M 站相关联。主站和从站组提供:通过 TDoA(到达时间差)方法定位和跟踪发射源,通过三角测量方法定位和跟踪发射源,使用侦察数据完成 RAP,与空军自动电子识别指挥和控制系统合作。
NIST 气体传感器研讨会
在这一领域,研究人员通常认识到将新发现融入传感产品存在时间差。本次研讨会题为“气体传感器:未来技术战略”,旨在及时发现和讨论与开发和商业化适用于不断扩大的成分监测应用范围的新型气体传感器设备相关的障碍。大多数其他关于传感器开发和使用的论坛都围绕研究会议和高度具体的应用领域展开。本次研讨会的独特之处在于它提供了一个开放的环境,参与者广泛,重点关注