XiaoMi-AI文件搜索系统
World File Search System月球轨道
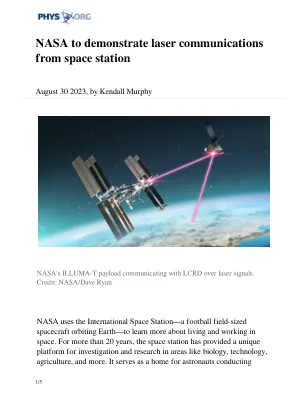
美国宇航局将演示空间站的激光通信
除了 LCRD 之外,ILLUMA-T 的前身还包括 2022 TeraByte 红外传输系统,该系统目前正在低地球轨道上的一颗小型立方体卫星上测试激光通信;月球激光通信演示,在 2014 年的月球大气和尘埃环境探测器任务期间将数据从月球轨道传输到地球并返回;以及 2017 年的激光通信科学光学有效载荷,它展示了与无线电信号相比,激光通信如何加速地球和太空之间的信息流。

AAS 22-616 低能潮汐属性...
航天器轨迹设计将飞行器的物理能力与动态环境知识相协调,以到达太空中的首选目的地。识别可用的传输几何形状和硬件规格对于产生可行的解决方案是必不可少的。一个挑战是了解控制飞行器在太空中任何特定区域移动的底层动态结构。扩展多体系统的基本知识有助于构建理想的路线。本研究的目标是表征地球-月球-太阳系统中存在的低能结构的一般行为。其动机与美国宇航局阿尔忒弥斯计划的发展有关,该计划的公共和私营部门现在都对月球任务表现出越来越浓厚的兴趣。1 对于到月球区域的传输时间不受限制的任务,低能量传输提供了推进剂效率高的路径。在地球-月球-太阳系统中,一种低能量传输被称为弹道月球传输 (BLT)。弹道月球转移利用太阳的摄动,在月球轨道之外飞行数月。美国宇航局的地月自主定位系统技术操作和导航实验 (CAPSTONE) 任务于 2022 年 6 月发射,将使用 BLT 在今年晚些时候到达月球附近。2 近期的多个任务也将利用 BLT 到达月球轨道,包括韩国探路者月球轨道器任务 (KPLO)3 和 JAXA 的平衡月地点 6U 航天器 (EQU-ULEUS)。4
美国宇航局月球探索计划概述
国际空间站的长期合作伙伴渴望与 NASA 一起进入月球轨道。加拿大航天局 (CSA) 已承诺为 Gateway 提供先进的机器人技术,而欧洲航天局 (ESA) 计划提供国际居住舱 (IHab) 和 ESPRIT 模块,后者将提供额外的通信功能、用于部署科学有效载荷和立方体卫星的科学气闸舱以及 Gateway 的燃料补给。日本宇宙航空研究开发机构 (JAXA) 计划提供居住舱组件和后勤补给。俄罗斯航天局 (Roscosmos) 也表示有兴趣在 Gateway 上进行合作。
sls-参考指南-2022-v2-508-0.pdf
本文件由位于阿拉巴马州亨茨维尔的 NASA 马歇尔太空飞行中心的 SLS 项目办公室准备,该办公室负责 SLS 的设计、开发、测试和工程。SLS 是一种新型超重型火箭,将作为 Artemis 任务的一部分将宇航员送上月球。SLS 和猎户座载人飞船 Artemis I 的首次飞行将从佛罗里达州的 NASA 肯尼迪航天中心升空,并将无人驾驶的猎户座飞船送入月球轨道。Artemis I 是一次严格的试飞,旨在从 Artemis II 任务开始的载人飞行之前彻底测试 SLS 火箭的所有系统。
SLS 参考指南 2022 印刷版
本文件由位于阿拉巴马州亨茨维尔的 NASA 马歇尔太空飞行中心的 SLS 项目办公室准备,该办公室负责 SLS 的设计、开发、测试和工程,SLS 是一种新型超重型火箭,将作为 Artemis 任务的一部分将宇航员送上月球。SLS 和猎户座载人飞船 Artemis I 的首次飞行将从佛罗里达州的 NASA 肯尼迪航天中心升空,并将无人驾驶的猎户座飞船送入月球轨道。Artemis I 是一次严格的试飞,旨在从 Artemis II 任务开始的载人飞行之前彻底测试 SLS 火箭的所有系统。

下载日期:2023 年 4 月 12 日星期三 03:00:49 来源:内容下载自 HeinOnline
在 20 世纪 60 年代和 70 年代,许多被认为是可以接受和无害的生活方面现在已经变得不可接受和有害 - 而大型火箭级撞击月球肯定是这一演变的一部分 - 但第四条对“任何必要的设备或设施”的广泛接受是一个过于宽泛的定义。该条款不仅允许对“和平”一词进行广泛的解释,而且还要求对“必要”进行定义。例如,我们是否允许永久性破坏月球表面的采矿设备的操作?如果允许,破坏程度如何:用普通肉眼观察;通过普通业余望远镜观察;还是从 100 公里的月球轨道观察?
2023年12月每月PDF -CloudFront.net
JPL主任威廉·皮克林(William Pickering)于1963年10月在JPL成为第一位追踪和数据获取的助理实验室主管Eberhart Rechtin表示,该动力来自William Giberson。他是测量师Lunar Lander计划的经理。与JPL的Ranger和Mariner航天器不同,它们与JPL一样使用预加载的命令序列,而测量师应实时在月球表面进行控制。,他们需要比游骑兵更需要大量的地面基础设施,并将其放入。测量师还有望同时运营兰利研究中心的月球轨道和JPL的水手,因此网络时间的安排也将变得有必要。

地球与……之间的双脉冲转移轨迹
美国宇航局计划在 2024 年之前将人类送回月球 [1]。这引发了人们对月球探索任务的兴趣。为了有效地将人类和机器人任务送上月球,正在研究不同的最佳低和/或高推力轨道转移。最简单、最快速但不节能的方法是霍曼转移 [2]。霍曼转移需要两次燃烧,一次在轨道的近地点,另一次在远地点。航天器在地球停泊轨道上时位于近地点,远地点设置在所需的月球轨道高度。另一种研究航天器从地球到月球的转移的方法是使用拼块圆锥曲线法。拼块圆锥曲线近似依赖于太阳系动力学的开普勒分解 [3]。通过沿轨道小心地切换 SOI(影响球),航天器的运动在给定时间内仅受一个主要天体控制。例如,在使用补片圆锥曲线进行地球到月球转移的情况下,航天器在转移的大部分时间里将位于地球的 SOI 中,而在最后的时间里只靠近月球。霍曼转移和补片圆锥曲线都是 2BP(二体问题)中简单、直接的转移方法。从 1960 年代到 1980 年代,包括月球和阿波罗任务在内的所有登月任务都使用了一些对霍曼和补片圆锥曲线转移的改动。2BP 向月球的转移受到发射窗口的限制,并且需要多次修正燃烧,从而增加了总 Δ𝑉 成本。以阿波罗 11 号为例,它必须进行两次月球轨道交叉燃烧和四次中途修正。阿波罗 11 号进入月球轨道所需的总 Δ𝑉 为 13571.1 ft/s(4.136 km/s)[4]。
美国宇航局对阿尔忒弥斯任务的管理
阿尔忒弥斯计划旨在于 2024 年底之前让人类重返月球,而不是最初计划的 2028 年。面对缩短的时间、不确定的预算以及所需开发工作的初期阶段,NASA 对其常规采购和项目管理实践进行了修改,以期加快任务进度并降低成本。该机构的月球战略包括开发太空发射系统 (SLS) 重型运载火箭、猎户座多用途载人飞船 (Orion) 太空舱、将宇航员从月球轨道运送到月球表面的载人着陆系统 (HLS)、绕月飞行的门户前哨、下一代宇航服,以及通过商业着陆器向月球表面运送科学调查和技术演示。
太空报告 第 36 届年度太空研讨会特别版 2021
维度 1:持续月球探索 2019 年 8 月,时任美国副总统迈克·彭斯指示 NASA 向国家空间委员会提交一份“可持续月球表面探索和发展计划,包括人类初步探索火星所需的技术和能力”。由此产生的《阿尔特弥斯计划:持续月球探索与发展》3 描述了建立持续月球存在的高级理念,在月球轨道和月球表面开发和部署越来越强大和复杂的能力。这些能力包括机器人和载人系统。由 26 个航天机构组成的论坛国际空间探索协调小组 (ISECG) 已确定 31 项技术“对未来的探索任务至关重要”。4