XiaoMi-AI文件搜索系统
World File Search System柔顺

关于位移和力的评论文章......
本综述论文涵盖了柔顺机构放大器中的各种新兴技术。力放大和变形放大在柔顺机构中是可行的。由柔顺结构组成的位移放大机构在需要准确性、精密性、紧凑性和可靠性的 MEMS 应用中得到了更多的响应。我们可以使用各种类型的柔顺机构的力和位移放大。简要讨论了不同类型的位移机构,如双稳态、混合、斯科特-罗素、自导、比例、正交、棘轮、柔顺机构和力柔顺机构。简要研究了高效压缩模式能量收集器和压电能量收集器等柔顺机构的力放大。本文报告了各种类型的柔顺机构的应用。
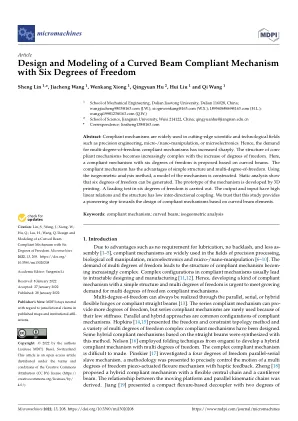
六自由度曲梁柔性机构的设计与建模
摘要:柔顺机构广泛应用于精密工程、微纳操作、微电子等前沿科技领域,对多自由度柔顺机构的需求急剧增加。随着自由度的增加,柔顺机构的结构变得越来越复杂。本文提出了一种基于曲梁单元的六自由度柔顺机构。该柔顺机构具有结构简单、自由度多的优点。利用等几何分析法,建立了该机构的模型。静态分析表明可生成六个自由度。通过3D打印开发了该机构的样机。进行了六自由度加载试验。输出与输入具有高度的线性关系,结构间耦合性较低。我们相信这项研究为基于曲梁单元的柔顺机构设计迈出了开创性的一步。

鱼骨主动外倾角风洞测试...
提出了鱼骨主动弯曲 (FishBAC) 变形结构。这种新颖的、受生物启发的概念由四个主要元素组成:一个柔顺的骨架核心、一个预张紧的弹性基质复合材料柔顺蒙皮、一对与不可反向驱动的卷轴滑轮耦合的拮抗肌腱作为驱动机构,以及一个非变形主翼梁。FishBAC 概念能够产生翼型弯曲的大变化,因此被提议作为一种适用于固定翼飞机、直升机、风力涡轮机、潮汐涡轮机和倾转旋翼机的大型、连续可变弯曲解决方案。为了考虑该概念相对于现有技术的空气动力学性能,使用 FishBAC 概念对具有平整后缘襟翼的 NACA 0012 基线翼型和具有连续变形后缘的相同基线翼型进行了比较。在斯旺西大学的低速风洞中对一系列弯曲变形和攻角进行了测试。发现这两种方法都能产生类似的升力系数,但阻力结果的比较表明 FishBAC 几何形状的阻力显著降低。在通常用于固定翼和旋翼应用的攻角范围内,升力效率提高了 25% 左右。

共晶Sn-58Bi焊点在老化过程中的微观组织粗化和力学性能
摘要 随着封装的微型化和异质集成化,人们一直致力于开发低温焊料。Sn-58Bi 共晶焊料的熔点为 138°C,是一种颇具吸引力的替代方案。由于 Sn-Bi 焊料的熔点较低,即使在室温下也可能发生 Bi 粗化。本文观察了室温储存过程中 Sn-58Bi 接头的微观结构演变。室温老化导致焊料基体中 Bi 相的溶解和粗化,尤其是在初生 Sn 相和 Sn-Bi 枝晶中。通过纳米压痕测量了单个富 Sn 相和富 Bi 相的力学性能。结果表明,由于溶液强化,老化焊点中富 Sn 相比富 Bi 相具有更高的杨氏模量和硬度。Bi 相比 Sn 更柔顺,硬度更低。

学习报告,ENSC 231-2012 年秋季,S. Sangha
到目前为止,机器人领域一直被机械刚性结构所主导。但随着机器人的功能开始更接近人类,开发新型机器人势在必行。软机器人就是这样一种可能,它指的是由柔软、柔顺的材料制成且没有刚性骨架的机器人。其应用范围包括生物医学机器人、实地研究机器人、仿生学到智能假肢。软机器人主要由三种组件组成,即机器人主体、柔性执行器和可伸缩电子设备。可伸缩电子电路进一步由晶体管、导线等组成。因此,实现完全可伸缩电路需要可伸缩组件。但在所有这些组件中,导体是对整个电路可伸缩性产生主要影响的组件。在本报告中,我将介绍用于制造柔性、可伸缩导体的候选材料和工艺,以应用于软机器人领域的可伸缩电子设备。
二氧化硅的各向异性气相 HF 蚀刻以释放 Si 微结构
制造微机电系统 (MEMS) 的两种主要方法是体微加工技术和表面微加工技术。在体微加工的情况下,可移动结构的制造是通过选择性蚀刻掉结构层下面的处理基板来完成的,而在表面微加工中,一系列薄膜沉积和对堆栈中特定层(称为牺牲层)的选择性蚀刻产生最终所需的悬浮微结构。这两种 MEMS 制造方法的关键步骤是控制释放区域,从而精确定义柔顺机械结构锚 [1],如图 1 a 和 b 所示,显示了锚的底蚀。湿法或干法蚀刻工艺都可以去除牺牲层,使用前一种方法会遇到粘滞,而后一种方法会引入污染或残留物 [2]。选择牺牲层时需要考虑的重要设计因素包括:(i) 沉积膜的均匀性和厚度控制、(ii) 沉积的难易程度、(iii) 蚀刻和沉积速率、(iv) 沉积温度以及 (v) 蚀刻选择性。光刻胶由于易于蚀刻(使用氧等离子体或有机溶剂)且不会损害大多数结构材料而被用作牺牲层 [3–6]。然而,该工艺仅限于低温

小型行星探测器的概念研究:在金星上使用张拉整体结构
金星是太阳系中最神秘、最有趣的探索地点之一。然而,金星表面环境恶劣,岩石密布,温度、压力极高,化学腐蚀性极强。探测金星表面的行星探测车具有科学价值,但必须使用非常规方法代替传统的机器人控制和机动性。这项研究提出,张拉整体结构可以提供适应性和控制性,代替传统的机械装置和电子控制,用于金星表面和其他极端环境中的机动性。张拉整体结构重量轻且柔顺,由简单重复的刚性和柔性构件构成,仅通过张力稳定,灵感来自生物学和几何学,适合折叠、展开和适应地形。它们还可以利用智能材料和几何学的特性来实现规定的运动。根据科学探索的需要,简单的张拉整体探测车可以提供机动性和对地形和环境条件的稳健性,并可以由风等环境源提供动力。各种各样的张拉整体结构都是可能的,这里提出了一些适用于不稳定和复杂环境的初步概念。关键词:行星探测器,金星,张拉整体结构

空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等。充分利用空间机器人自主装配空间结构是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了总结。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,总结了空间机器人装配方法。从控制角度综述了如何解决在轨装配的振动抑制与柔顺装配问题,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间装配场景,本文介绍了地面验证试验的发展情况,为空间在轨装配技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中的一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨装配未来的研究方向。
空间机器人在轨装配技术综述
大型结构建造是未来太空探索的主要发展趋势之一,例如大型空间站、大型空间太阳能发电站、大型空间望远镜等,充分利用空间机器人实现空间结构自主装配是航天工业的重要发展趋势之一。考虑到在轨装配是解决大型空间结构建造问题的有效方法,有必要推动和促进空间机器人在轨装配技术的研究。因此,本文对近几十年来空间机器人技术的发展现状以及相关的空间机器人在轨装配技术进行了综述。首先,基于空间机器人运动规划和装配序列规划,介绍了空间机器人规划算法的发展。针对空间机器人装配任务,综述了空间机器人装配方法。从控制角度,综述了如何解决在轨装配的振动抑制和柔顺装配,为空间机器人对空间大型结构的自主智能装配提供参考。为了在地面模拟空间组装场景,本文介绍了地面验证试验的发展情况,为空间在轨组装技术的有效验证提供了思路。综上所述,虽然过去的研究已经较好地解决了其中一些问题,但未来仍需要进一步的研究。最后,展望了空间机械在轨组装未来的研究方向。