XiaoMi-AI文件搜索系统
World File Search System标准天线
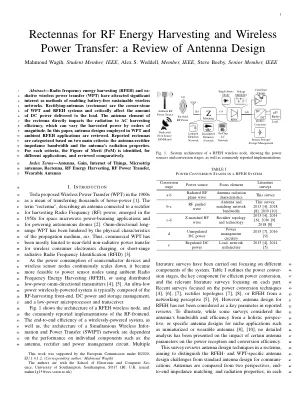
用于射频能量收集和无线电力传输的整流天线:天线设计回顾
已经针对该系统的不同组件进行了文献调查。表一概述了功率转换阶段、高效功率转换的关键组件以及针对每个部分的相关文献调查。最近的调查主要关注功率转换技术 [4], [6], [7]、整流器拓扑 [7], [8] 或从网络角度来看的 RFEH [5], [9]。然而,在已报道的评论中,RFEH 的天线设计并未被视为关键参数。例如,虽然一些调查从整体角度考虑了天线的带宽和效率,或针对小型化或可穿戴天线等小众应用的特定天线设计 [8], [10],但尚未对某些天线参数对功率接收和转换效率的影响进行详细分析。 58 本综述回顾了整流天线中的天线设计技术,旨在区分 RFEH 和 WPT 特定的天线设计挑战与通信的标准天线设计。从两个角度比较天线,即端到端阻抗匹配和辐射特性,每个角度都进行比较。

LMT-西 LMT-西 - RW 阿普尔顿
技术特性:加密功能加密 NSA 类型 1 (BATON) 最高可达秘密级别数据网络兼容性通过 AP/WB 到有线网络 (802.3、TCP/IP、UDP 等)加密有效负载整个 IEEE 802.11b MAC 协议数据单元 (MPDU) 数据密钥端口加载机制手动,通过 DS-102 通用填充设备 (CFD) AN/CYZ-10 密钥填充单一密钥;对称 PC 卡分类 – 未分类密钥或无密钥控制加密项目 (CCI) – 带密钥秘密 COMSEC 项目客户/用户 COMSEC 批准的政府机构和政府合同供应商无线电特性无线介质未经许可,ISM 频段,2412–2462 MHz(美国)信道数 11(3 个不重叠)每信道链路速率 1、2、5.5 和 11 Mbps 发射功率(标称)设置 EIRP IRP 最大值 16–18 dBm 14–16 dBm(25–40 mW)最小值 10–12 dBm 8–10 dBm(6–10 mW)标准天线双 2.0 dBi 偶极子天线连接器接口标准 SMA 支持外部配件

DIFAR 水听器在鲸鱼研究中的应用
定向频率分析和记录 (DIFAR) 声纳浮标已被海军使用数十年,可通过单个传感器为低频(小于 4 kHz)声源提供磁方位。计算技术的进步使这种声学传感器技术越来越易于使用且功能更强大。此处提供的信息旨在帮助新用户确定 DIFAR 传感器是否适合鲸鱼声学研究。须鲸的声学探测范围平均接近 20 公里,但根据条件不同,范围从 5 到 100 公里不等。DIFAR 声纳浮标到典型研究船的无线电接收范围平均为 18 公里,船上有全向天线,声纳浮标上有标准天线。对一组鲸鱼叫声分析了 DIFAR 方位精度,其中鲸鱼的轨迹是众所周知的。经发现,DIFAR 传感器的方位标准偏差为 2.1 度。可以使用 DIFAR 方位消除已知位置研究船声音的系统误差和磁偏差。DIFAR 传感器阵列需要的传感器比传统水听器阵列少,有时可以提供比传统水听器使用的“到达时间”双曲线方法更准确的源位置。与传统水听器相比,使用 DIFAR 传感器更容易定位船舶等连续声音,因为通常很难找到瞬态特征来估计使用传统水听器阵列进行双曲线定位所需的时间差。DIFAR 水听器系统非常适合露脊鲸、蓝鲸、小须鲸、长须鲸和其他须鲸的叫声,以及包括船舶在内的许多其他声源。
DIFAR 水听器在鲸鱼研究中的应用
定向频率分析和记录 (DIFAR) 声纳浮标已被海军使用了数十年,它通过单个传感器为低频(小于 4 kHz)声源提供磁方位。计算技术的进步使这种声学传感器技术越来越易于使用且功能更强大。此处提供的信息旨在帮助新用户确定 DIFAR 传感器是否适合鲸鱼声学研究。须鲸的声学探测范围平均接近 20 公里,但根据条件不同,范围从 5 到 100 公里不等。DIFAR 声纳浮标到典型研究船的无线电接收范围平均为 18 公里,船上有全向天线,声纳浮标上有标准天线。对一组鲸鱼叫声分析了 DIFAR 方位精度,其中鲸鱼的轨迹是众所周知的。经发现,DIFAR 传感器的方位标准偏差为 2.1 度。可以使用 DIFAR 方位消除已知位置研究船声音的系统误差和磁偏差。DIFAR 传感器阵列需要的传感器比传统水听器阵列少,有时可以提供比传统水听器使用的“到达时间”双曲线方法更准确的源位置。与传统水听器相比,使用 DIFAR 传感器更容易定位船舶等连续声音,因为通常很难找到瞬态特征来估计使用传统水听器阵列进行双曲线定位所需的时间差。DIFAR 水听器系统非常适合露脊鲸、蓝鲸、小须鲸、长须鲸和其他须鲸的叫声,以及包括船舶在内的许多其他声源。