XiaoMi-AI文件搜索系统
World File Search System滚筒式
滚筒式树枝粉碎机
滚筒式树枝粉碎机型号 2518 机器序列号 _____________ 发动机型号及规格编号 _____________ 发动机序列号 _____________ PTO/离合器型号及规格编号 _____________ 离合器序列号 _____________ 购买日期 _____________ 经销商 _____________ Carlton J.P.Carlton Company Div. D.A.F. Inc. 121 John Dodd Road Spartanburg, SC 29303 电话 (864) 578-9335 传真 (864) 578-0210 www.stumpcutters.com

热泵的审查滚筒烘干机能量效率和相关技术
随着世界上能源限制和消费的增加,研究所有技术的所有领域都很重要。在住宅建筑业中,干燥是一种重要的能源消费者,占美国住宅电力的6%(EPA,2011年)。热泵技术在住宅滚筒式干衣机中变得越来越流行。本文介绍了热泵滚筒式干燥机研究涵盖空调的技术,用于空调浪费恢复,恢复性热交换器,系统建模和控制优化。还审查了与蒸气压缩周期增强相关的其他技术,包括替代工作流体,可变容量系统和组件技术。未来的研究领域被确定以使下一代热泵干燥机能源效率。
英国乡村生活博物馆 第 1 页,共 865 页 TR REE R & J ...
改进型道路清扫机、滚筒式卫生车和蒸汽压路机用水车的图解价格表 n.d [c.1900] 由 Charles D. Phillips、Emlyn Engineering Works、Newport、Monmouth 销售 类型:TRA

太阳能光伏安装消费者指南 - 家庭智能能源
为什么看起来好像我先从电网而不是电池取电?每天,每个家庭的用电量都在不断波动。水壶、滚筒式烘干机、灯和打开电视都会影响家庭的用电量。有时,家庭会先从电网取电,然后再从电池取电,这是电池管理系统的必要功能,设计成这样是为了确保电池的使用寿命。如果电池在需要时启动,并且没有功率需求的增加或减少,那么电池寿命将大大缩短。因此,有时您的监控可能会显示家庭先从电网取电,然后再从电池取电。这是完全正常的,随着时间的推移,您应该会看到电池开始供电。
消费者太阳能PV安装指南 - 家庭智能能源
为什么看起来我是从网格中绘制的,而不是首先是电池?每天的每一次房屋消费都在整天不断波动。水壶,滚筒式烘干机,灯和电视上的电视都会影响您的房屋消耗的功率。在电池电池之前,您的房屋将在电池前从网格中汲取灵感,这是电池管理系统的必要特征,并以这种方式设计以确保电池寿命的寿命。如果电池完全按照需要时启动,并且没有电源要求上下的斜坡,则电池寿命将大大缩短。随后,有时可能会出现在您的监视上,因为房屋在电池前从网格中汲取电源。这是完全正常的,随着时间的流逝,您应该看到电池启动以提供电源。

庭院 | 波特兰路 | 沃辛
带有安全门禁电话系统的公共前门可通往维护良好的公共入口走廊,走廊上有通往所有三间公寓的门和一个大型公共自行车储藏室。这所完美无瑕的住宅的私人前门通向入口走廊,走廊设有通往卧室和浴室的楼梯,门通向厨房/早餐室。这间现代化的厨房配备了一系列落地和壁挂式“Benchmarx”橄榄绿色振动筛式单元、40 毫米实心橡木台面以及包括洗碗机和冰箱/冰柜在内的一体化电器。这个时尚的空间有足够的空间容纳一张小早餐桌。大型双开门通向大小适中、朝西的客厅/餐厅,客厅/餐厅铺设了与厨房相同的狮子橡木复合地板。这间房间朝西,配有大窗户和双开门,可通往私人阳光露台,明亮通风,有空间容纳沙发和餐桌。地下一层是主双人卧室,面积宽敞,为 13 英尺 05 英寸 x 11 英尺 05 英寸,还配有嵌入式衣柜。还有一间办公室/书房,可以用作“卧室”。宽敞的现代浴室配有地暖,配有全套四件套白色卫浴用品,包括步入式淋浴间、浴缸、马桶和洗手盆。浴室旁边是杂物间,可以放置叠放式洗衣机和滚筒式烘干机。
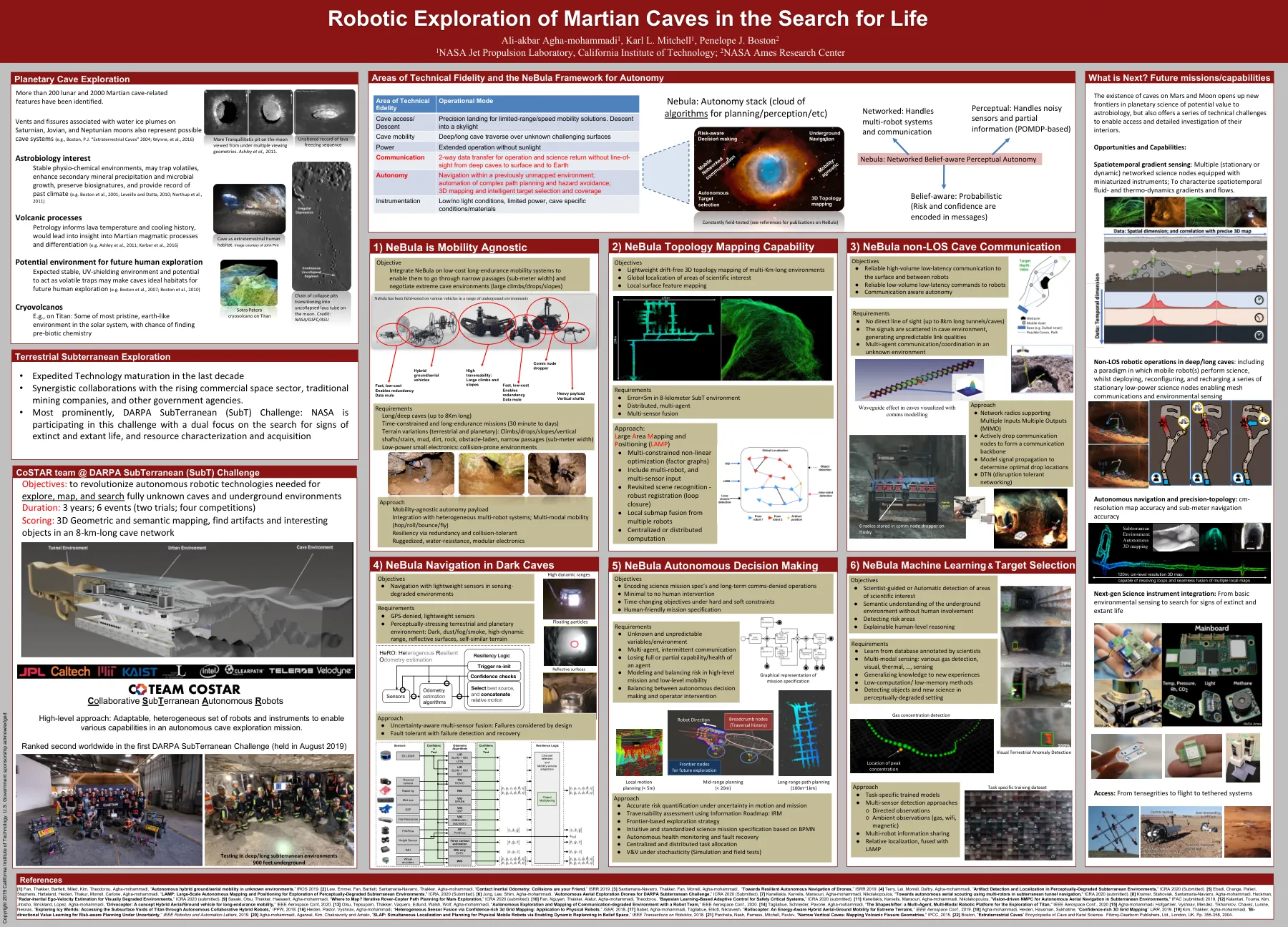
机器人探索火星洞穴寻找生命
[1] Fan,Thakker,Bartlett,Miled,Kim,Theodorou,Agha-Mohammadi,“自动杂种地面/未知环境中的空中移动性”,IROS 2019。[2] Lew,Emmei,Fan,Bartlett,Santamaria-Navarro,Thakker,Agha-Mohammadi,“接触惯性探测:碰撞是您的朋友,” ISRR2019。[3] Santamaria-Navarro,Thakker,Fan,Morrell,Agha-Mohammadi,“迈向无人机的弹性自动导航”,ISRR2019。[4] Terry,Lei,Morrell,Daftry,Agha-Mohammadi,“感知衰落的地下环境中的伪影检测和定位”,ICRA 2020(提交)。[5] Ebadi,Change,Palieri,Stephens,Hatteland,Heiden,Thakur,Morrell,Carlone,Carlone,Agha-Mohammadi。“灯:大规模的自主映射和定位,用于探索感知衰落的地下环境,” ICRA,2020年(提交)。[6] Jung,Lee,Shim,Agha-Mohammadi,“ DARPA地下挑战的自动空中勘探无人机”,ICRA 2020年(提交)。[7] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下隧道导航中使用多旋转器使用多旋翼的自主空中搜寻”,ICRA 2020(提交)。[8] Kramer,Stahoviak,Santamaria-Navarro,Agha-Mohammadi,Heckman,“视觉上降解环境的雷达惯性自我效率估计”,ICRA 2020(提交)。[9] Sasaki,Otsu,Thakker,Haesaert,Agha-Mohammadi,“在哪里映射?迭代的漫游者 - 弯曲器路径计划火星探索,” ICRA 2020(提交)。[10] Fan,Nguyen,Thakker,Alatur,Agha-Mohammadi,Theodorou。“基于贝叶斯学习的自适应控制对安全关键系统的自适应控制”,ICRA 2020(提交)。[11] Kanellakis,Karvelis,Mansouri,Agha-Mohammadi,Nikolakopoulos,“在地下环境中进行自主空中航行的视觉驱动的NMPC,IFAC(提交),[12],[12] [12]长期耐药性活动的概念混合空中/地面车辆。[13] Otsu,Tepsuporn,Thakker,Vaquero,Edlund,Walsh,Walf,Wolf,Agha-Mohammadi,“与机器人团队对贫困环境的自动探索和映射”[14] Tagliabue, Schneider, Pavone, Agha-mohammadi, “ The Shapeshifter: a Multi-Agent, Multi-Modal Robotic Platform for the Exploration of Titan, " IEEE Aerospace Conf., 2020 [15] Agha-mohammadi, Hofgartner, Vyshnav, Mendez, Tikhomirov, Chavez, Lunine, Nesnas, “探索冰冷的世界:通过自动协作混合机器人访问泰坦的地下空隙,” IPPW,2018。[16] Heiden,牧师,Vyshnav,Agha-Mohammadi,“通过置信度丰富的3D网格映射:应用于物理机器人的异质传感器融合:Iser,2018年。[17] SABET,AGHA-MOHAMMADI,TAGLIABUE,ELLIOTT,NIKRAVESH,“滚筒式:能源吸引能量的混合杂种空中地形迁移率对极端地形”,IEEE Aerospace Conf。,2019年。[18] Agha-Mohammadi,Heiden,Hausman,Sukhatme,“信心丰富的3D网格映射” IJRR,2019年。[19] Kim,Thakker,Agha-Mohammadi,“不确定性下的风险感知计划的双向价值学习”,IEEE机器人和自动化信,2019年。[21] Parcheta,Nash,Parness,Mitchell,Pavlov,“狭窄的垂直洞穴:映射火山裂缝几何形状”,IPCC,2015年。pp。[20] Agha-Mohammadi,Agarwal,Kim,Chakravorty和Amato,“ Slap:通过在信仰空间中启用动态重建的物理移动机器人的同时本地化和计划,”机器人技术的IEEE Transactions,2018。[22]波士顿,“洞穴和喀斯特科学的百科全书”。Fitzroy-Dearborn Publishers,Ltd。,英国伦敦。355-358,2004。