XiaoMi-AI文件搜索系统
World File Search System激光波长

激光波长和脉冲能对原子层析成像中锡涂层蒸发行为的影响:多功能仪研究
研究了激光波长对原子探针断层扫描(APT)中元素组成分析中精度的影响。系统比较了三种不同的商业原子探针系统 - LEAP 3000 x HR,LEAP 5000 XR和LEAP 6000 XR-用于研究较短激光波长的锡模型涂层,尤其是在深紫外线(DUV)范围内,对蒸发行为的影响。发现的结果表明,较短波长的使用提高了元素组成的准确性,而主潮具有相似的电场强度。因此,热效应减少,进而提高质量分辨能力。这项研究的一个重要方面包括估计不同工具的能量密度比。波长的降低伴随着由于激光斑点尺寸较小而导致的能量密度增加。此外,还研究了检测器技术的进步。最后,确定探测器的死时间,并评估了死区,以调查具有LEAP 6000 XR的氮化物测量中的离子堆积行为。



GASE和INSE转变后金属葡萄球源层的拉曼光谱石墨烯和相关材料的拉曼光谱
单层石墨烯(SLG)(Novoselov等,2004)可以使用显微镜(如果放置在Si+SiO 2厚度100 nm或300 nm上)(Casiraghi等,2007a)。SIO 2层充当光的腔,并根据其厚度导致建设性或破坏性干扰(Casiraghi等,2007a)。图1显示了计算出的光学对比度作为激光波长和SIO 2厚度的函数,对比度最大值在100和300 nm厚度,对于450至600 nm之间的常用激光波长。虽然通过光学对比进行成像可以使其厚度有一个了解,但它不足以获取更多的定量信息,例如掺杂,混乱,应变等。拉曼光谱镜通常是一种强大的特征技术,通常是碳,范围从富勒烯,纳米管,石墨碳到无定形和类似钻石的碳(Ferrari and Robertson,2000; Tuinsstra and Koenig and Koenig,1970; 1970; Fresselhaus et al。在石墨烯中,拉曼光谱现在可以通常用于提取层n的层数,以估计掺杂和应变的类型和数量,以及检查石墨烯的质量,因为这种光谱技术对缺陷也很敏感(Ferrari和Basko,2013年)。
传教士庞巴迪全球6500飞机
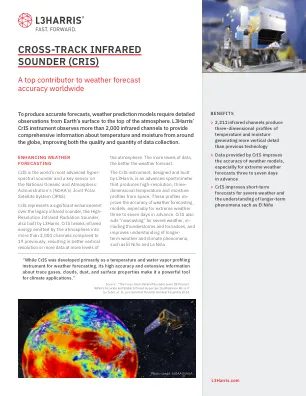
通过激光波长校准和霓虹灯灯泡光谱校准完成干涉仪的校准。内部校准目标(ICT)由一个高度发射的,深腔的黑体组成,它利用经过飞行的高级基线成像仪(ABI)遗产设计组成。ICT的温度知识大于140 millikelvin。包括一个被动振动隔离系统,以允许在50毫克环境中进行仪器操作。仪器光学元件与结构和仪器电子设备都热脱钩。整体仪器设计是模块化的,它允许平行组装和快速仪器集成。

在...
图S6:单层WS 2的拉曼和PL光谱(样品2)。(a)室温下H-Bn / WS 2 / H-BN样品2的拉曼光谱,激发激光波长为514 nm,功率为3 mW。在拉曼光谱中,A 1G和E 2G模式分别定位在419 cm -1(52 MeV)和359 cm -1(44 MeV)(用虚线表示)。单层WS 2可以从A 1G和E 2G线之间的拉曼移位差确定。将最强的拉曼峰在352 cm-1处归因于二阶拉曼模式2 la。(b)具有激发激光波长为532 nm的极化解析的拉曼光谱,第一阶仅在SCP配置中可见1G模式,而E 2G模式仅在OCP配置中观察到E 2G模式。(c)PL光谱在恒定激发能力为10 µ W处的温度演化。在290和180 K时很好地观察到了A-Exciton(X)和Trion(T)。随着温度的降低,激子和TRION线转移到更高的能量(蓝移),并且A-Exciton的相对峰强度降低。在78和12 K时,局部激子(L)出现,而A-Exciton消失了。这些光谱特征与先前的结果一致。2,3
高功率,狭窄的线宽固态深紫外线激光在193 nm处通过LBO晶体中的频率混合
摘要。在LBO晶体中具有两个阶段,在193 nm处有60兆瓦的固态深紫外线(DUV)激光器,狭窄的线宽。泵激光器分别来自258 nm和1553 nm,源自自制的YB-Hybrid激光器,分别采用了第四次谐波产生和ER掺杂的纤维激光器。YB-HYBRID激光器最终是功率缩放的2 mm×2 mm×30 mm YB:YAG散装晶体。伴随着221 nm的220兆瓦DUV激光器,193 nm激光器的平均功率为60 mW,脉冲持续时间为4.6 ns,重复速率为6 kHz,线宽约为640 MHz。据我们所知,这是有史以来报告的LBO晶体产生的193 nm激光和221 nm激光的最高功率,也是193 nm激光的最狭窄线宽。 值得注意的是,转化效率为221至193 nm的转化效率为27%,为258至193 nm的转化效率,这是迄今报告的最高效率值。 我们展示了LBO晶体生产数百毫克甚至瓦特级193 nm激光器的巨大潜力,这也铺平了一种新的方式来产生其他DUV激光波长。据我们所知,这是有史以来报告的LBO晶体产生的193 nm激光和221 nm激光的最高功率,也是193 nm激光的最狭窄线宽。值得注意的是,转化效率为221至193 nm的转化效率为27%,为258至193 nm的转化效率,这是迄今报告的最高效率值。我们展示了LBO晶体生产数百毫克甚至瓦特级193 nm激光器的巨大潜力,这也铺平了一种新的方式来产生其他DUV激光波长。

什么是nif? - 国家点火设施
NIF复合物NIF涵盖了三个相互联系的建筑物:光学组装建筑,激光和目标区域建筑以及操作支持建筑物。在光学组装大楼内,在严格的清洁室条件下组装了大精度工程激光组件,分为称为可更换单元的特殊模块,以安装在激光系统中。激光和目标区域建筑物在两个相同的托架中容纳192个激光束。大镜子,专门用于激光波长,并安装在高度稳定的10层高度结构上,将激光束引导穿过“切换场”并进入目标湾。镜子聚焦在10米直径,混凝土屏蔽的130吨目标腔室的确切中心。所有建筑物和公用事业的建造于2001年完成。在

ISPRS 2019 年最佳论文!- RIEGL
每年,国际摄影测量与遥感学会 (ISPRS) 都会从《ISPRS 摄影测量与遥感杂志》的众多出版物中评选出年度最佳论文。2019 年,该奖项授予了科学文章《用于极浅水域激光雷达测深的全波表面和底部检测算法的设计和评估》,作者是 Roland Schwarz、Gottfried Mandlburger、Martin Pfennigbauer 和 Norbert Pfeifer。RIEGL 研究部的 Roland Schwarz 和 Martin Pfennigbauer 与维也纳科技大学和斯图加特大学合作,成功地利用他们文章中提出的 SVB 算法(表面、体积和底部)为水下地形测绘做出了新的创新贡献。他们的方法的一个显著优势是它只依赖于单一激光波长。陪审员对回报波形的详细建模、解释的清晰度、令人信服的实验结果以及该方法更广泛适用的潜力印象深刻。
高精度激光干涉仪反馈系统
为了进行补偿,RCU10 单元将编码器提供的正交输入转换为“分辨率单位”计数脉冲和相关方向(上/下线)。随后是数字缩放电路,允许更改有效分辨率,从而将激光波长相关单位转换为更标准的工程单位。(例如,在机床应用中,633 nm 通常转换为 1 µm。)缩放电路之后,注入器装置允许将“分辨率单位”脉冲添加或减去计数脉冲流。通过缩放和“分辨率单位”脉冲注入的组合来实现补偿。将这些校正应用于反馈后,将其转换为数字正交或模拟正弦/余弦并发送到控制系统。整个过程的延迟小于 2 µs。