XiaoMi-AI文件搜索系统
World File Search System爬升速度
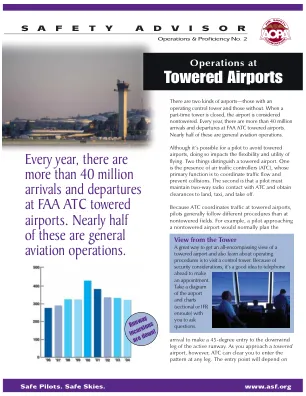
塔楼机场 - Tony Pool。Cessna Citation 飞行员
噪音不仅仅是一个好主意到达时,这可能意味着要避免这些区域或保持传统模式的高度。使用最佳爬升速度,降低爬升功率,并在起飞后尽快收回襟翼,以最大限度地降低飞机噪音。



下降性能测试 - 免费
上个月我们完成了如何减少锯齿状爬升数据和确定最陡角度爬升速度 V x 以及相关爬升角度和爬升梯度的说明。本月我们将解决下降性能问题,如果您认为下降只不过是反向爬升,那么您基本上是对的。如何让飞机获得最佳下降性能可能是您在巡航前往目的地时讨论的问题。与副驾驶或乘客开玩笑是一种很好的方法——砰!发动机熄火了。现在怎么办?有一件事是肯定的。现在不是思考飞机最佳滑行速度的好时机。更好的时间是您的下一次飞行,确定飞机的滑行性能比我们在过去几个月中详细介绍的爬升性能测试更容易。飞机的爬升率取决于功率的大小
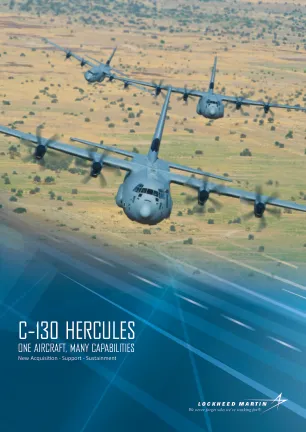
C-130 大力神 - 洛克希德·马丁
C-130XJ 保留了其前代机型的坚固机身,但性能和能力得到了极大改进。新的推进系统提供了更大的航程、更低的油耗和更好的起飞性能。发动机采用电子控制,在海平面温度高达 104°F 时提供最大功率,从而大大提高了在高海拔和高温下的性能。缩短的起飞距离使 C-130XJ 能够在较短的跑道上飞行;更快的爬升速度使其能够更快地达到更安全的高度以避开敌对威胁;更高的巡航上限使其能够在更省油的航线上飞行;更快的巡航速度和更低的油耗使每架飞机每天可以出动更多架次。

数据驱动的攀爬轨迹不确定性量化
摘要 高效的轨迹预测工具将成为未来基于轨迹的运营 (TBO) 的关键功能。除了管制员的行动之外,爬升飞行中的不确定性是飞行轨迹预测误差的主要组成部分。出于运营方面的考虑,飞机起飞重量和爬升速度意图(定义爬升剖面的关键性能参数)并不完全适用于基于回合的轨迹预测基础设施。在空中交通流量管理范围内,扇区进入和退出时间(包括爬升结束和下降开始的时间)是需求容量平衡过程的主要输入。在这项工作中,我们专注于爬升轨迹的不确定性,以量化和分析它们对爬升至巡航高度的时间的影响。我们通过飞机飞行记录数据集(即 QAR)使用了模型驱动的数据统计方法。根据此分析,为飞机起飞重量和速度意图生成了概率定义。获得了这些爬升参数与飞行距离之间的回归,以减少战略层面的不确定性。此外,通过自适应不确定性减少来降低爬升不确定性也在飞行战术层面得到体现。通过模拟,说明了降低飞机质量不确定性对爬升时间的影响。关键词:空中交通管理、轨迹预测、不确定性量化、BADA 缩写

风速控制和障碍物清除限制起飞...
为了确保在发动机严重失效的情况下飞行安全,商用飞机必须按照 14 CFR § 25.121 的规定达到最低爬升梯度。这些规定的爬升梯度与许多起飞程序中严格的起飞最低标准不相称;许多从布满障碍物的机场起飞的重型飞机被迫绕过障碍物,因为它们的发动机失效爬升梯度远低于安全飞越所需的值。在这里,我们研究了逆风或顺风的存在如何影响模拟 10 节逆风或顺风的发动机失效障碍物清除。我们发现,对于较轻的起飞重量和较低的爬升速度,飞机轨迹对风的敏感度更高。在合理的飞行重量下,实际风可能会消耗掉 FAA 的整个“总净”飞行路径安全裕度。同时,我们看不出任何理由为什么风速责任应该影响选择延长第二段的起飞。

无人机控制系统分析、数学模型及仿真试验
稳定无人驾驶飞行器 UAV 的天花板是确保其在自主模式下安全运行的关键问题。对于垂直起降的无人机,它允许稳定悬停并系统地执行委托给它的进一步任务以及自主起飞和降落。同时,确保无人机的稳定悬停是一件困难的事情,因为从控制理论的角度来看,这个过程具有非线性特征。增加问题复杂性的另一个因素是,在大多数实际解决方案中,由于成本低廉,该类飞机的天花板稳定是借助超声波传感器进行的。反过来,这些传感器提供的测量分辨率相对较低(约 1 厘米),采样频率为 20 Hz,操作范围从顶部到 - 约 7 米 - 以及从底部到 - 约 0.35 米。因此,不可能准确地确定天花板,更不用说由于分辨率低 - 爬升速度。确定爬升速度的问题似乎是关键,这主要是由于结构解决方案的关键,关键重要性在于PID控制器(比例积分微分)调节范围内控制误差的推导准确性[1],[2],[3]。
数据驱动轨迹不确定性...
高效的轨迹预测工具将成为未来基于轨迹的运营 (TBO) 的关键功能。除了控制器操作之外,爬升飞行中的不确定性是飞行轨迹预测误差的主要组成部分。由于运营问题,飞机起飞重量和爬升速度意图(定义爬升曲线的关键性能参数)并不完全适用于基于回合的轨迹预测基础设施。在空中交通流量管理范围内,扇区进入和退出时间(包括爬升结束和下降开始的时间)是需求容量平衡过程的主要输入。在这项工作中,我们专注于爬升轨迹的不确定性,以量化和分析它们对爬升到巡航高度的时间的影响。我们通过飞机飞行记录数据集(即QAR)使用了模型驱动的数据统计方法。分析结果为飞机起飞重量和速度意图生成了概率定义。获得了这些爬升参数与飞行距离之间的回归,以减少战略层面的不确定性。此外,通过自适应不确定性减少来降低爬升不确定性也在飞行战术层面得到证明。通过模拟,说明了降低飞机质量不确定性对爬升时间的影响。关键词:空中交通管理、轨迹预测、不确定性量化、BADA 缩写

欢迎来到双胞胎时间 - 女孩飞行训练
双引擎比单引擎好,对吗? 为了立即消除双引擎飞机的飞行安全性总是更高的误解,我们可以这样想:驾驶双引擎飞机意味着您现在失去一个引擎的可能性是原来的两倍,当然这可能发生在飞行的任何阶段。 通过有效的训练,您将学会在发动机失去紧急状况时有效应对,同时最大限度地发挥飞机的性能。 双引擎飞机的训练并不是学习驾驶具有两个引擎的更复杂的飞机,而是学习如何在只有一个引擎运转时有效地控制和管理该飞机。 性能 许多学生第一次接触双引擎飞机时心中的头号谬论是:当您失去一个引擎时,您会失去 50% 的性能。 错了。 两个引擎产生所有的动力,同时也会产生所有的阻力。 当您在双引擎飞机上失去一个引擎时,您会失去飞机通常产生的 50% 的动力,并且会失去 80-90% 的多余推力(性能)。飞机的爬升性能是这种过量推力的产物。此外,在某些情况下,爬升性能也可能被视为“最小下沉率”。为了正确看待这种性能下降,如果您通常以 1200 fpm 的速度爬升,使用一台发动机,那么您现在的爬升速度为 200 fpm。如果有足够的高度,紧急情况会有所缓解,但请考虑一下从