XiaoMi-AI文件搜索系统
World File Search System相位控制
光学频率计量和相位控制...
nist.gov › general › pdf PDF 作者:SA Diddams — 作者:SA Diddams 光谱学和计量学。... 精密计量学和光谱学,间隔为... D.M. Kane、S.R. Bramwell 和 A.I. Ferguson,Appl. Phys. B.

通过波导连接的两个开放量子比特腔系统中的几何相位控制
开放量子系统、量子比特-场相互作用的数学操控取决于对主阻尼 [1] 和内在退相干 [2] 方程的分析/数值求解能力。为了解决这些操控问题,在有限的物理环境下研究了开放系统的量子现象 [3-7]。量子几何相是量子力学中的一个基本内在特征,是量子计算的基础 [8]。如果最终的时间相关波函数回到其初始波函数,则量子系统的演化(从初始波函数到最终的时间相关波函数)是周期性的。当这些量子系统的演化不是周期性的时,几何相不再表现出稳健性,所关注的相关量是总相位,称为 Pancharatnam 几何相 (PGP) [9]。PGP 的物理含义是初始状态和最终状态发生干涉,内积的振幅反映了状态之间的相位差。 PGP 在中子干涉仪中实验性地进行了 [10,11]。此后,Berry [12] 在绝热系统中明确定义了几何相,并将其扩展到非绝热循环 [13] 和非循环 [14,15] 演化的量子态。几何相被提出用来实现不同量子模型的几何量子计算,例如:离子阱 [16]、腔场中的原子 [17] 和超导电路 [18]。时间相关的几何相在更多的物理模型中得到了研究,例如:腔 QED 模型充满了非线性介质并包含量子阱 [19],相位量子比特色散耦合到有损 LC 电路的模型 [20] 和具有斯塔克位移的囚禁离子模型 [21]。描述位于孤立腔体中的量子比特之间传输量子态的物理模型,这些量子比特通过光纤模式连接,是构建量子网络的有效系统。在单光子级量子通信中,光纤的使用取得了重大进展 [ 22 ]。这些模型对于设计

4 类风力发电机组的直流母线汇集采用相位控制以最大限度地减少能量存储
摘要 — 典型的 4 型风力涡轮机使用直流链路逆变器将电机连接到电网,从而为 N 涡轮机农场的每个涡轮机提供 2 个功率转换器步骤,并将产生 2 N 个功率转换器。这项工作提出了一种用于 4 型风电场的直流总线收集系统,该系统减少了所需的转换器总数,并最大限度地降低了储能系统 (ESS) 要求。这种方法要求每个涡轮机有一个转换步骤,ESS 需要一个转换器和一个电网耦合转换器,这导致风电场的转换器数量为 N +2,并可能节省大量成本。然而,直流收集系统的权衡之一是需要增加能量存储以过滤功率变化并提高电网的电能质量。本文介绍了一种有效的直流总线收集系统设计的新方法。风电场的直流收集在涡轮机之间实施功率相位控制方法,该方法可以过滤变化并提高电能质量,同时最大限度地减少对增加储能系统硬件的需求并提高电能质量。相位控制利用了新颖的功率包网络概念和非线性功率流控制设计技术,可确保稳定和增强的动态性能。本文介绍了直流收集和相位控制的理论设计。为了证明这种方法的有效性,提供了详细的数值模拟示例。

在误差减少回路中使用神经网络的准强化学习对 100 个激光束阵列进行实验相位控制
近来,需要高平均功率激光束的应用数量急剧增加,涉及大型项目,如空间清洁 [1]、航天器推进 [2]、粒子加速 [3],以及工业过程 [4] 或防御系统 [5]。激光光束组合是达到极高功率水平的最常用方法之一,特别是相干光束组合 (CBC) 技术 [6]。它们旨在对放大器网络传输的平铺激光束阵列的发射进行相位锁定,以产生高亮度的合成光束。由于实际激光系统(尤其是光纤激光系统)中阵列中光束之间的相位关系会随时间演变,因此这些技术必须通过伺服环路实时校正合成平面波的相位偏差。近年来,CBC 技术得到了广泛发展,探索了调整合成离散波前中各个相位的不同方法。它们可以分为两大类。在第一类中,测量阵列中光束的相位关系,然后进行校正 [7]。在第二种方法中,实际波前和期望波前之间的差异通过迭代过程得到补偿 [8]。在后一种情况下,优化算法驱动反馈回路,分析所有光束之间干涉的阵列相位状态的更多全局数据 [9,10]。这些技术通常更易于实施,所需电子设备更少,但需要更复杂的数值处理,其中一些技术在处理大量光束时速度会降低。最后一个问题与反馈回路中达到预期相位图所需的迭代次数有关,该迭代次数会随着要控制的相位数的增加而迅速增加。最近,人们研究了神经网络 (NN) 和机器学习,以期找到一种可能更简单、更有效的方法来实现相干光束组合。已发表的文献 [11] 中涉及的一种方案依赖于卷积神经网络 (VGG) 的直接相位恢复,然后一步完成相位校正,例如在自适应光学 NN 的开创性工作 [12]。 NN 用于将光束阵列干涉图样的强度(在透镜焦点处形成的远场或焦点外的图像、分束器后面的功率等)直接映射到阵列中的相位分布中。恢复初始相位图后,可以直接应用相位调制将相位设置为所需值。[11] 中报告的模拟表明,当阵列从 7 条光束增加到 19 条光束时,基于 CNN 的相位控制的精度会下降。这一限制在波前传感领域也得到了强调,因此 NN 通常仅用作初始化优化程序的初步步骤 [13]。另一种可能的方案是强化
紧凑型 28 纳米 FD-SOI CMOS 76-81 GHz 汽车频段接收器路径,具有精确的 0.2° 相位控制分辨率
雷达系统确定目标的距离、速度和到达角 (AoA)。本研究的重点是 AoA 确定的准确性。目标反射信号的方位角或 AoA 由相控阵系统中每个接收器链信号之间的相位差决定。接收器链之间的固有相移差异是造成不准确的一个原因。因此,为了准确确定 AoA,必须在接收器电路中控制相位变化。校准相位的模拟解决方案通常使用移相器,但有源移相器耗电,无源移相器有损耗且需要很大的面积 [5]。此外,在这些频率下使用移相器实现小于一度的精度非常复杂 [6]。另一种方法是使用
HVDC 传输_PDF - IEEE Web 托管
当阳极和阴极之间的电压为正时,电流会流过阀门。要使阀门换向电流,必须有正电位(电压),并且晶闸管必须具有触发脉冲。在相反方向上,即当阳极和阴极之间的电位为负时,触发脉冲不起作用。当阳极和阴极之间的电压变为负时,阀门中的电流结束。可以通过推迟触发来延迟电流开始流过阀门或从一个阀门换向另一个阀门的时刻。这种方法允许改变整流器输出电压的平均值。触发脉冲是通过使用电子控制装置同步网络而产生的。这些脉冲可以从它们的“自然触发”点(即两相电压相交的点)移位。触发脉冲移位的方法称为相位控制。
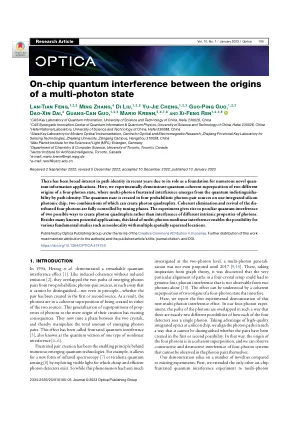
多光子态起源之间的片上量子干涉
路径同一性是众多新型量子信息应用的基础,近年来引起了人们的广泛兴趣。在这里,我们通过实验演示了四光子态的两个不同来源的量子相干叠加,其中多光子受挫干涉由于路径同一性的量子不可区分性而出现。量子态是在一个集成硅光子芯片上的四个概率光子对源中创建的,其中两种组合可以创建光子四联体。分布的四个光子的相干消除和恢复完全由调谐相位控制。实验产生了两种可能创建光子四联体的方式的特殊量子干涉,而不是光子不同固有性质的干涉。除了许多已知的潜在应用之外,这种多光子非线性干涉还为各种基础研究提供了可能性,例如具有多个空间分离位置的非局域性。
用于地球观测和天文光学成像的 6U CubeSat 可部署望远镜
立方体卫星等纳米卫星的可用体积对望远镜直径施加了物理限制,限制了可实现的空间分辨率和光度测定能力。例如,12U 立方体卫星通常仅具有足够的体积来容纳直径为 20 厘米的单片望远镜。在本文中,我们介绍了可部署光学器件的最新进展,该器件可在 6U 立方体卫星中容纳直径 30 厘米以上的望远镜,其中 4U 的体积专用于有效载荷,2U 的体积专用于卫星总线。为了达到这种高紧凑度,我们在发射时折叠主镜和次镜,然后在空间中展开和对齐。通过控制每个镜段的活塞、倾斜和倾斜,可实现可见光谱部分的衍射极限成像质量。在本文中,我们首先描述整体卫星概念,然后报告有效载荷的光机设计以部署和调整镜子。最后,我们讨论了主镜的自动相位控制,以控制望远镜的最终光学质量。

硅光子微孔子基于高
光脉冲成型是超快光学,射频光子和量子通信的强大技术。现有系统依赖于带有平面波导段的批量光学元件或集成平台进行空间分散,但它们在实现填充器(少量或sub-GHz)频谱控制方面面临限制。这些方法需要相当大的空间,或者在组装以实现实现分辨率的情况下,从预测的相误差和光损失中进行了措施。解决这些挑战时,我们使用具有内联相位控制和高光谱分辨率的微波炉过滤器库提出了铸造式六通道硅光子塑造器。利用现有的基于梳子的光谱技术,我们设计了一个新型系统来减轻热串扰并实现我们的芯片上塑形器的使用。我们的结果表明,在3、4和5 GHz的可调通道间距上,塑形器能够在六个梳子线上相同的能力。特别是在3 GHz通道间距下,我们展示了时间域中的任意波形的产生。这种可扩展的设计和控制方案有望满足未来对高精度光谱塑形功能的需求。