XiaoMi-AI文件搜索系统
World File Search System管制空域
在非管制空域内按 IFR 飞行 - CAA
有关其他 IFR 航班移动的信息将包括在有关飞机的同一高度或飞机将要经过的高度在相关飞机的航迹附近飞行的 IFR 航班的信息。当该地区没有已知的 IFR 航班时,将使用短语“无报告的 IFR 交通”。当已知或观察到的飞机与已识别飞机的路径相冲突时,雷达管制员可以(在非管制空域)警告飞行员注意已识别飞机。管制员用来协助已识别飞机观察其他飞机的方法通常包括 12 小时制时钟的相对方位、距离和视在运动,以及(如果有)未经验证的 C 模式高度读数。请务必记住,雷达协助并不能免除您避开其他飞机的责任。不要依赖雷达来帮助您避开其他飞机,因为雷达控制器只能提供雷达覆盖范围内的飞机的交通信息。交通信息的质量取决于飞机是否开启应答器并选择 ALT。

NPA 2021-14 U-SPACE 研讨会 | 问答
在非管制空域,有人驾驶交通的密度较低,因此与无人驾驶交通相遇的风险较低;而在管制空域,有人驾驶交通的密度较高,相关风险也较高。这就是为什么监管框架在非管制空域建立有人驾驶/无人驾驶融合,在管制空域建立有人驾驶/无人驾驶隔离。在管制空域,唯一负责管理空域的实体是 ATC。在非管制空域,此类实体不管理空域,因此需要确保有人驾驶飞机不会靠近 U 空间中的无人机,并且 USSP 将向 UAS 操作员提供安全信息。
SI-02_2023-Air-Traffic-Controller-situational-awareness-1.pdf
此安全信息 (SI) 有助于空中交通管制员在管理非管制空域交通时提高态势感知能力。此 SI 的发布还确保空中交通管制员在处理非管制空域交通时始终保持高度警惕和主动性。此外,此 SI 还有助于确保空中交通管制员熟悉当地程序,并在管理非管制空域交通时将安全放在首位。

领空侵犯——BMAA 指南
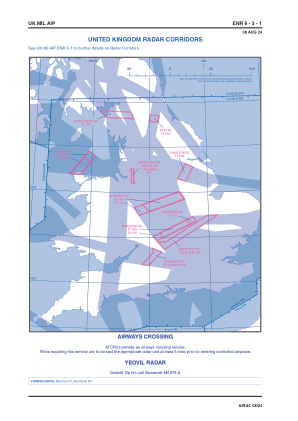
现在,许多机场都分配有独特的代码,称为频率监控代码(有时称为监听代码)。如果设置了该代码,则意味着飞行员正在通过无线电收听分配给设置了该代码的机场的频率。飞行员无需与机场的 ATC 通话,但允许管制员在需要时联系飞机。ATSU 可能会发现飞机似乎在侵犯管制空域的航线上,并能够联系飞机并提供信息以防止(如果存在管制能力)或解决侵犯。在操作频率监控代码时,飞行员仍有责任保持在外部管制空域。

企业意向声明 2022/23 2024/25
几十年来,新西兰空中交通管制空域的设计一直是零散发展的,导致了许多效率低下的问题。2019 年,新西兰航空开始全面彻底地审查我们划分空域的方式,并确定了调整的机会,以提高航道的整体效率,减少飞机燃油消耗和碳排放。我们目前正在努力在短期内缩短一些高空航道的航迹。我们将努力评估未来几年我们空域组织方式的潜在变化带来的好处。
企业意向声明 2022/23 2024/25
新西兰空中交通管制空域的设计在过去几十年中零散发展,导致了许多低效现象。2019 年,新西兰航空开始全面彻底地审查我们划分空域的方式,并确定了可以进行调整的机会,以提高飞行路线的整体效率,减少飞机燃油消耗和碳排放。我们目前正在努力在短期内缩短一些高空飞行路线的航迹。我们将努力评估未来几年我们空域组织方式的潜在变化带来的好处。
企业意向声明 2022/23 2024/25
新西兰空中交通管制空域的设计在过去几十年中零散发展,导致了许多低效现象。2019 年,新西兰航空开始全面彻底地审查我们划分空域的方式,并确定了可以进行调整的机会,以提高飞行路线的整体效率,减少飞机燃油消耗和碳排放。我们目前正在努力在短期内缩短一些高空飞行路线的航迹。我们将努力评估未来几年我们空域组织方式的潜在变化带来的好处。
企业意向声明 2022/23 2024/25
新西兰空中交通管制空域的设计在过去几十年中零散发展,导致了许多低效现象。2019 年,新西兰航空开始全面彻底地审查我们划分空域的方式,并确定了可以进行调整的机会,以提高飞行路线的整体效率,减少飞机燃油消耗和碳排放。我们目前正在努力在短期内缩短一些高空飞行路线的航迹。我们将努力评估未来几年我们空域组织方式的潜在变化带来的好处。