XiaoMi-AI文件搜索系统
World File Search System绝对测量

使用金薄膜对电感耦合等离子体中真空紫外光子通量的绝对测量
描述了一种绝对测量等离子体边缘真空紫外 (VUV) 光子通量的新方法。让等离子体产生的光撞击远离等离子体的带负偏压的镀金铜基板。测量由此产生的光电子发射电流,然后根据已知的 Au 光电子产额找到绝对光子通量。该方法用于量化氩/氦电感耦合等离子体 (ICP) 产生的 VUV 光量。观察到 104.82 和 106.67 nm 的强发射,对应于氩的 1s 2 和 1s 4 共振态。在远程位置测得的最大积分 VUV 光子通量为 3.2 × 10 13 光子/cm 2 s。估计这对应于 ICP 边缘 5 × 10 15 光子/cm 2 s 的通量,在类似条件下报告的值范围内。

利用金薄膜绝对测量电感耦合等离子体中的真空紫外光子通量
描述了一种绝对测量等离子体边缘真空紫外 (VUV) 光子通量的新方法。让等离子体产生的光撞击远离等离子体的带负偏压的镀金铜基板。测量由此产生的光电子发射电流,然后根据已知的 Au 光电子产额找到绝对光子通量。该方法用于量化氩/氦电感耦合等离子体 (ICP) 产生的 VUV 光量。观察到 104.82 和 106.67 nm 的强发射,对应于氩的 1s 2 和 1s 4 共振态。在远程位置测得的最大积分 VUV 光子通量为 3.2 × 10 13 光子/cm 2 s。估计这对应于 ICP 边缘 5 × 10 15 光子/cm 2 s 的通量,在类似条件下报告的值范围内。

放射性核素中子源发射的各向异性
电离辐射计量中心摘要。放射性核素中子源为各种中子测量装置提供了一种产生标准中子校准场的便捷方法。需要知道源的以下属性才能表征某一点的场:总中子发射率、中子能谱以及发射强度随角度的变化。假设光谱随角度的变化对于大多数应用而言可以忽略不计。放射性核素中子源的总发射率可以在国家物理实验室 (NPL) 通过硫酸锰浴技术绝对测量,或通过慢化探测器进行比较测量。各种常用源的中子能谱可在公开文献中找到。本报告描述了 NPL 用于测量放射性核素中子源各向异性发射的方法。给出了相对于各种源类型和封装的圆柱轴的测量中子角分布。还给出了使用蒙特卡洛传输代码 MCNP 计算的分布,这些分布通常与测量的分布具有良好的一致性。

宇宙中最酷的指南针 - Indico Global
惯性传感器在导航系统中至关重要,但通常依赖于 GPS 网络。利用量子效应的新型惯性传感器有望在没有 GPS 的环境中(例如太空或水下)提供更好的运动绝对测量。在这项工作中,我们展示了如何使用环形玻色-爱因斯坦凝聚态 (BEC) 作为旋转传感器,方法是印记相 [1] 以产生低能声子驻波激发,然后观察激发的节点和波腹响应旋转的进动。我们观察到印记激发的高品质因数高达 Q = 27,当与相对较大的 100 μm 环直径相结合时,可实现比以前证明的更高的灵敏度 [2,3]。持续电流被印记到环中,模拟慢速旋转速度并展示该方案的测量效用。将实验结果与使用有限温度随机投影 Gross Pitaevskii 方程 (SPGPE) 的模拟结果进行了比较,揭示了主要的阻尼机制,并进一步展示了可以最小化阻尼的参数空间。
r 使用通道流进行绝对粘度测定
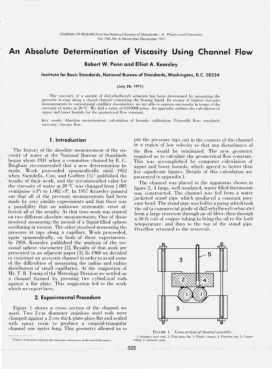
美国国家标准局对水的质量进行的研究始于 1931 年左右,当时由 E. C. Bingham 主持的一个委员会建议做出新的测定。工作断断续续地进行着,直到 1952 年,瑞典、科和戈弗雷 [1] 发表了他们的工作成果,将 20°C 时水的粘度建议值从 1.005 厘泊 (cP) 改为 1.002 cP。1957 年,克斯利指出,之前的所有测量都是通过非常相似的实验进行的,有可能是一个未知的系统误差影响了所有结果。当时,开始了两种不同的绝对测量工作。其中一项实验是测量充满液体的球体扭转振动的周期。另一项实验是测量毛细管上水龙头处的压力。这两个实验再次断断续续地进行着。1959 年,Kearsley 发表了对扭球粘度计的分析 [2]。该项研究的结果发表在相邻的论文 [3] 中。1968 年,我们决定构造一个精确的通道,以避免测量小管柱的半径和半径分布时遇到的一些困难。根据计量部门的 T. R. Young 先生的建议,我们决定采用将两个圆柱形杆压在平板上形成的通道。这一建议促成了这项工作

一种稳健且模块化的多传感器融合方法应用...
摘要 — 人们早已知道,融合来自多个传感器的信息用于机器人导航可以提高稳健性和准确性。然而,在现场部署之前对传感器组合进行精确校准以及应对传感器中断、不同的测量速率和延迟,使多传感器融合成为一项挑战。因此,大多数情况下,系统不会为了简单而利用所有可用的传感器信息。例如,在需要机器人从室内过渡到室外的任务中,通常会忽略一旦在室外就可以免费获得的全球定位系统 (GPS) 信号,而是仅依靠在整个任务期间持续可用的传感器馈送(例如,视觉和激光)。当然,这是以牺牲实际部署中的稳健性和准确性为代价的。本文提出了一个通用框架,称为多传感器融合扩展卡尔曼滤波器 (MSF-EKF),能够处理来自理论上无限数量的不同传感器和传感器类型的延迟、相对和绝对测量,同时允许在线对传感器套件进行自我校准。MSF-EKF 的模块化允许在操作期间无缝处理额外/丢失的传感器信号,同时采用状态缓冲方案并增强迭代 EKF (IEKF) 更新,以允许有效地重新线性化预测,以接近绝对和相对状态更新的最佳线性化点。我们使用配备 GPS 接收器以及视觉、惯性和压力传感器的微型飞行器 (MAV) 在户外导航实验中展示了我们的方法。

利用纠缠光子的量子计量
尽管大多数物理实验都是用独立粒子进行的,但纠缠粒子的集体性质揭示了量子世界最迷人和最意想不到的方面。埃尔温·薛定谔首先指出“纠缠不是量子力学的一种特性,而是量子力学的特征”。纠缠态粒子对行为的一个奇特之处在于,尽管每个单独的粒子都表现出固有的不确定性,但纠缠对的联合实体却不会表现出这种不确定性。例如,虽然单个粒子到达的时间可能完全随机,但纠缠对必须始终同时到达。此属性为进行绝对测量提供了独特的工具。我们的目标是探索纠缠的无数含义和重要性,并利用它来开发一种新型光学测量——量子光学计量学。自发参量起源的非线性过程中产生的孪生光子之间存在独特的非经典关联。这种孪生量子之间的非经典联系不会因孪生量子之间任意大的分离而减弱,即使它们位于光锥之外。过去二十年来,孪生态已被用于进行确定性的量子实验,并产生了违反直觉的结果,这些实验包括由爱因斯坦-波多尔斯基-罗森 (EPR) 悖论引起的实验,例如贝尔不等式的各种测试 [1-12],以及非局部色散抵消、纠缠光子诱导透明性和单色光纠缠光子光谱。这些孪生光束的出现使得人们无需借助于量子干涉仪就可以进行此类实验。