XiaoMi-AI文件搜索系统
World File Search System航路点

使用...实现大型喷气式飞机的自主导航和着陆
摘要—我们介绍了智能自动驾驶系统 (IAS),该系统能够通过使用人工神经网络和模仿学习观察和模仿人类飞行员,实现大型喷气式飞机(如客机)的自主导航和着陆。IAS 是解决自动飞行控制系统当前问题的潜在解决方案,该系统无法执行从给定机场起飞并在另一个机场降落的全程飞行。提出了一种导航技术和一种强大的模仿学习方法。模仿学习使用人类飞行员在飞行模拟器中演示要学习的任务,同时从这些演示中捕获训练数据集。然后,人工神经网络使用这些数据集自动生成控制模型。控制模型模仿人类飞行员在航路点之间倾斜导航以及执行最后进近和着陆时的技能,而飞行管理程序则生成飞行路线,并决定在当前飞行阶段启动哪些 ANN。实验表明,即使在提供有限的示例后,IAS 也能高精度地处理此类飞行任务。所提出的 IAS 是一种新方法,使用与经验丰富的人类飞行员的技能和能力相匹配的 ANN 模型来实现大型喷气式飞机的完全控制自主。

Polaris:具有磁性星座的移动机器人的准确,无远见的信托
信托标记在移动机器人中是必不可少的,包括其姿势校准,上下文感知和导航。然而,现有的基准标记仅依赖于基于视觉的感知,而这种看法遭受了遮挡,能量开销和隐私泄漏等限制。我们提出了北极星,这是第一个基于新颖的,全堆栈的磁性传感的无视力标记系统。北极星即使在NLOS方案中也可以实现可靠,准确的姿势估计和上下文感知。其核心设计包括:(1)一种新型的数字调制方案,磁取向迁移键合(MOSK),可以编码关键信息,例如航路点和使用Passive Magnets的坐标; (2)一个强大而轻巧的磁传感框架,用于解码和定位磁性标签。我们的设计还为北极星提供了三个关键特征:足够的编码容量,可靠的检测准确性和低能消耗。我们已经建立了一个北极星的端到端系统,并在现实世界中进行了广泛的测试。测试结果表明北极星以达到高达0.58 mm和1°的姿势估计,功率消耗仅为25.08 mW。
朝着自主飞行员与人工船员之间的安全合作进行智能,监视和侦察
摘要 - 当今的许多航空任务是由飞行员和任务专家的异质机组人员完成的。由于完全自动化的飞行员(AP)已集成到航空人员中,因此对于安全保证和误差效率来说,有效的团队将是必要的。这项飞行模拟器研究探索了非驾驶员运营商与AP合作进行海事情报,监视和侦察(ISR)任务之间的团队。该研究比较了航路点AP的行为,需要在飞机控制中进行人工干预,以防止造成损害造成的敌方船只的飞行,并采取碰撞避免行为,在该行为中,AP会主动使用控制屏障功能来主动避开敌方船只。这种主动的AP行为导致飞机损坏较少,但更容易预测的团队绩效,尽管任务时间更长。结果表明,情况意识随着AP复杂度级别和任务负载水平而异。参与者在失败时成功并校准其信任时对AP的积极感知。索引术语 - 自主,自动飞行员,协作,团队,人为因素,ISR,控制障碍功能

未知空间上的协同映射和目标搜索...
摘要 — 本文提出了一种协作式地图绘制和目标搜索算法,用于在城市环境中检测单个移动地面目标,该目标最初对于配备有噪声、范围有限的传感器的自主四旋翼飞行器团队来说是未知的。目标根据有偏随机游走模型移动,搜索代理(四旋翼飞行器)构建一个目标状态图,该图对过去和现在的目标位置进行编码。检测前跟踪算法将目标测量值同化为对数似然比,各向异性克里金插值预测未探索区域中占用节点的位置。在搜索区域的每个位置评估的相互信息定义了一个采样优先级表面,该表面由加权 Voronoi 算法划分为候选航路点任务。通过迭代解决效用最大化分配问题,将任务分配给每个代理。数值模拟表明,与非自适应割草机和随机覆盖策略相比,所提出的方法更具优势。我们还通过使用两个真实四旋翼飞行器和两个虚拟四旋翼飞行器进行户外飞行测试,对所提出的策略进行了实验验证。

自主驾驶系统中故障出现的错误配置软件测试
系统配置选项的优化对于确定其性能和功能性至关重要,尤其是在自动驾驶软件(ADS)系统的情况下,因为它们具有多种此类选项。广告领域的研究工作优先考虑开发了拟议的测试方法,以增强自动驾驶汽车的安全性和安全性。目前,基于搜索的方法用于在虚拟环境中测试ADS系统,从而模拟了现实世界的情况。但是,这种方法依赖于优化自我汽车和障碍的航路点,以产生触发违规的各种情况,并且没有以前的技术专注于从配置的角度优化广告。为了应对这一挑战,我们提出了一个名为Conferve的框架,这是第一个自动配置测试框架。Confve的设计着重于通过不同配置下的不同广告测试方法产生的重新违规场景出现,利用9个测试Oracles使以前的广告测试方法可以找到更多类型的违规行为,而无需修改其设计或实施,而无需修改其新颖的技术,以识别出漏洞的违法行为违规和违反违法行为和违反违法行为。我们的评估结果表明,同盟可以发现1,818条独特的违规行为,并减少74.19%的重复违规行为。

附录一个数据模板
计划-QA我们通过零射方法评估了Llama2-13b [4]的功能,并发现其广泛的培训数据为交通规则理解提供了坚实的基础。然而,其有限的数学实力在抓住和推论内结构和数值表达之间的连接方面构成了挑战。为了解决这个问题,我们介绍了一个基于语言的QA数据集,旨在将LLM从通用模型转换为熟练于自主驾驶计划的专业模型。这种增强的重点是完善其在教学解释和推理中的能力。Concretely, we delineated the level of autonomous driving planning into three granularities: 1) high-level instructions: formulated through velocity commands including stop , accelerate , decelerate , maintain speed , and routing commands including turn left , turn right , go straight , 2) control: assessing the values of ve- locity and acceleration, 3) and waypoint: encompassing a series of points.设计了六种问题类型是为了阐明高级指令(控制 - 航路点频谱)之间的过渡关系,并根据NUPLAN [1]的日志数据对每个QA -PAIR进行调整。图s1a说明了通用系统提示模板适用于所有问题,而图s1b-s1g在系统提示中替换每个问题类型的特定示例,并在其各自的答案中替换<问题>和。
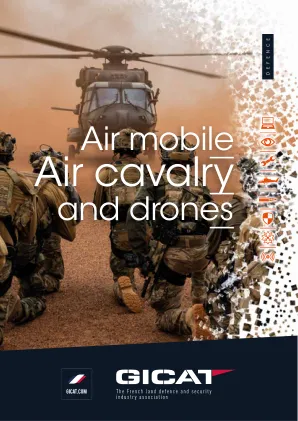
空气移动和无人机
除了推进器AXS-S1和AXS-M1(我们的旗舰产品)外,该公司目前在架子上有2种产品。AXS-M1产品是一种集成技术不可知的飞行平台型系统,无需14公斤有效载荷的尺寸少于1m*1m。一些规格: - 220 km/h最高速度 - 最大64公斤。推力 - 以每秒1个旋转而无需旋转限制的操作 - 由于推进方向(以阵风至70kph测试),超过100 km/h层状的风电阻 - 至少5G加速了正常的飞行条件,而不会停滞不前。- 能够在任何方向(VTOL ++)以空投,降落和降落/降落。- 尺寸为35分钟的自主权,适用于70km/h的速度(或45min/50min空的45分钟/50分钟) - 非退休伸长率超过30 km,在70 km/h和20 km/h时为200 km/h,以200 km/h的速度(保守的基础)(保守的基础) - 准确的端口至最接近的港口(与10 cm的电动型号) - 与10 cm(热量巡回赛)相互交流,4级别,4级式,4级式,4级式(4级式),32,32,32,32,32,32模块的主体(可以在任何方向上安装) - 可自定义的前后(optronics,弹头,天线等)- 自主(通过航路点和预编程的终端攻击计划)或FPV控制(易于飞行) - 能够室内和室外飞行

人驾驶的无人机赛车:视觉处理和控制
摘要 - 人类赛车的无人机比算法更快,尽管仅限于固定的摄像头角度,身体速率控制和以数百毫秒为单位的响应潜伏期。从高度动态的视觉信息中选择适当的电机命令的人类飞行员的能力可以更好地理解能够为解决基于视觉的自主导航中当前挑战的关键见解。本文调查了无人机赛车任务中人类眼动,控制行为和战斗性能之间的关系。我们使用高度逼真的无人机赛车模拟器从21个经验丰富的无人机飞行员那里收集了一个多模式数据集,该模拟器也用于招募专业的飞行员。我们的结果表明,随着时间的推移,无人机赛车性能的任务提高。特别是,我们发现眼睛凝视跟踪未来的航路点(即大门),平均第一次固定发生1。5秒和16米,然后到达大门。此外,人类飞行员始终看着未来的内部横向路径(即左右转弯)和垂直演习(即上升和下降)。最后,我们发现飞行员的眼球运动与四极管的指挥方向之间存在很强的相关性,平均视觉运动响应潜伏期为220毫秒。这些结果强调了在人驾驶的无人机赛车中协调眼运动的重要性。我们公开提供数据集。

使用无人机直升机拦截器和传感器放置规划技术的广域监视系统
摘要 本项目提出并描述了由传感器/拦截器放置规划和拦截无人机 (UAV) 直升机组成的广域监视系统的实施。给定一个区域的二维布局,规划系统基于最大覆盖范围和最小成本最佳地放置周界摄像机。该规划系统的一部分包括 Erdem 和 Sclaroff 的径向扫描算法的 MATLAB 实现,用于生成可见性多边形。此外,还针对固定和 PTZ 情况提出了二维摄像机建模。最后,还放置了拦截器以最小化检测事件期间到周界上任何一点的最短路径飞行时间。其次,设计和实施了无人机直升机的基本飞行控制系统。飞行控制系统的主要目标是当操作员握住自动飞行开关时,将直升机悬停在原地。该系统代表了完整航路点导航飞行控制系统的第一步。飞行控制系统基于惯性测量单元 (IMU) 和比例积分微分 (PID) 控制器。该系统使用运行 Windows XP 和其他商用现货 (COTS) 硬件的通用个人计算机 (GPPC) 实现。此设置不同于通常使用定制嵌入式解决方案或微控制器的其他直升机控制系统。实验表明,在给定多种摄像机类型和参数的情况下,传感器放置规划可以在优化成本下针对几个典型区域实现 >90% 的覆盖率。此外,直升机飞行控制系统实验在短飞行时间内实现了悬停成功。但最终结论是,COTS IMU 不足以满足直升机控制系统等高速、高频应用的需求。

机器人操纵任务的基于Waypoint的强化学习
摘要 - 机器人武器应该能够学习新任务。这里的一个框架是强化学习,在该学习中,机器人具有编码任务的奖励函数,并且机器人自主学习的动作以最大程度地提高其奖励。现有的强化学习方法通常将此问题构成马尔可夫决策过程,并学习政策(或政策层次结构)以完成任务。这些政策原因是机器人臂需要采取的数百个细粒度的动作:例如,向右移动稍微移动或旋转几个度。但是我们希望机器人执行的操作任务通常可以分解为少数高级运动:例如,到达对象或转动手柄。在本文中,我们提出了一种基于通道的无模型增强学习方法。机器人现在没有学习低级策略,而是学习路点的轨迹,然后使用现有控制器在这些航路点之间进行插值。我们的关键新颖性是将基于Waypoint的设置作为一系列多臂匪徒构建:每个匪徒问题都对应于机器人运动沿线的单路点。从理论上讲,与标准框架相比,对这种重新制定的理想解决方案的遗憾界限较低。我们还引入了一个近似的后固定解决方案,该解决方案一次构建机器人的运动点。跨基准模拟和两个现实世界实验的结果表明,这种提出的方法比最先进的基线更快地学习新任务。请参阅此处:https://youtu.be/mmed-lyfq4y