XiaoMi-AI文件搜索系统
World File Search System陌生的
陌生的新世界:全球化、人工智能和发展
在英国、瑞典和意大利等西欧国家,当收入水平约为 14,000 美元(以 1990 年美元计算)时,制造业就业份额达到顶峰。印度和许多撒哈拉以南非洲国家似乎在收入水平为 700 美元时就已达到制造业就业份额的峰值。
大脑在睡眠期间选择性地收听陌生的声音
睡眠期间,大脑继续对环境刺激做出选择性反应。然而,这种反应的功能作用,以及它们是否反映了信息处理或感觉抑制,尚不完全清楚。在这里,我们向 17 位人类睡眠者(14 位女性)展示了他们自己的名字和两个陌生的名字,这些名字由熟悉的声音(FV)或陌生的声音(UFV)说出,同时在整晚的睡眠期间记录多导睡眠图。我们检测 K 复合体、睡眠纺锤波和微觉醒,并评估事件相关和频率反应以及对非快速眼动 (NREM) 睡眠期间呈现的不同刺激的试验间相位同步。我们表明,UFV 比 FV 引发更多的 K 复合体和微觉醒。当两种刺激都引起 K 复合波时,我们观察到更大的诱发电位、δ 波段(1 – 4 Hz)大脑反应更精确的时间锁定以及对 UFV 而非 FV 的高频(>16 Hz)范围的活动。至关重要的是,当听觉刺激不引起 K 复合波时,这些大脑反应差异会完全消失。我们的研究结果强调了大脑对听觉刺激的反应因与睡眠者的相关性而存在差异,并提出 K 复合波在睡眠期间调节感觉处理方面起着关键作用。我们认为,这种对外部感官信息内容特定的动态反应使大脑进入哨兵处理模式,在这种模式下,大脑参与睡眠期间正在进行的重要内部过程,同时仍保持处理重要外部感官信息的能力。

大脑在睡眠期间选择性地接收陌生的声音
版权所有 © 2022 Ameen 等人。这是一篇开放获取的文章,根据知识共享署名 4.0 国际许可条款分发,允许在任何媒体中不受限制地使用、分发和复制,前提是对原始作品进行适当的署名。

ARticulate:利用增强现实技术在陌生的智能空间中与智能助手进行一次性交互
智能空间技术已进入主流家居市场。目前,大多数用户都与他们(或熟人)设置并熟悉的智能家居进行交互。然而,随着这些技术传播到商业或公共环境,用户将需要频繁与不熟悉的智能空间进行交互,他们不知道这些空间有哪些可用功能,而且系统维护人员也不会在场提供帮助。用户需要快速独立地 1) 发现什么是可能的,什么是不可能的,以及 2) 利用可用的功能。在解决这一可发现性问题之前,智能空间系统的广泛采用是不可能的。我们设计并评估了 ARticulate,这是一个界面,它允许用户与智能助手成功进行智能空间交互,同时学习有关陌生空间中整个设备集的可转移信息。我们使用类似 Snapchat 的上下文照片消息的方法,通过两项技术(增强现实和自动完成)增强,允许用户确定可用的功能,并在他们从未见过的智能空间中一次性实现他们的目标,这是现有界面所不支持的。轻松操作不熟悉的智能空间的能力提高了现有系统的可用性,并消除了实现普适计算愿景的重大障碍。
建立感官友好型疫苗诊所
感官友好型诊所的益处 自闭症和医疗保健体验:由于各种原因,医疗保健访问可能会给自闭症儿童带来身体和心理上的压力(Sadatsafavi 等人,2015 年)。自闭症儿童比神经正常儿童更不灵活,日常生活的干扰会导致焦虑突然增加(Amorim 等人,2020 年)。医疗保健访问会打乱孩子的日常生活,从而导致痛苦并导致负面行为(Bultas 等人,2016 年;Wood 等人,2019 年)。明亮的灯光、嘈杂且陌生的声音、漫长的等待时间和拥挤的候诊室、与陌生人的相遇、陌生的气味、使用陌生的物体或工具、快节奏的相遇以及不舒服的触觉都可能导致在医疗保健访问期间过度刺激(Bultas 等人,2016 年;Wood 等人,2019 年;Sadatsafavi 等人,2015 年)。如何让医疗保健体验更具感官友好性:评估医疗保健环境中感官适应效果的研究发现,让医疗保健体验更具感官友好性可以改善自闭症儿童的体验,并使访问更有成效(Bultas 等人,2016 年;Sadatsafavi 等人,2022 年)。通过改变诊所环境、改变护理提供流程、改变医疗保健提供者的行为以及提供感官支持和准备材料,可以使诊所对自闭症患者更加感官友好 (Bultas 等人,2016 年;Sadatsafavi 等人,2022 年)。
充满活力的事物政治生态学 - MyCourses
化学物质和挥发性甲烷风。'我会把“生命”和“物质”的概念反复推敲,让它们变得奇怪,就像一个普通的词重复后会变成一个陌生的、无意义的声音。在这种疏远所创造的空间里,一种重要的物质性开始成形。
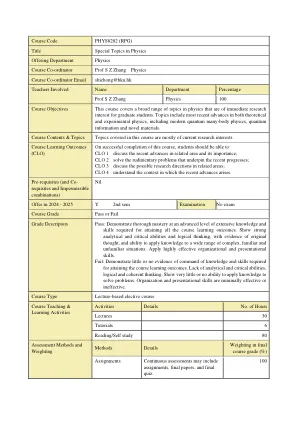
课程代码Phys8202(RPG)...
获得所有课程学习成果所需的技能。表现出强烈的分析和批判能力和逻辑思维,具有原始思想的证据,以及将知识应用于各种复杂,熟悉和陌生的情况的能力。运用非常有效的组织和演讲技巧。失败:几乎没有或没有所需的知识和技能的迹象

Wil Thomason
1。通过基于矢量采样的计划,微秒中的动作。Wil Thomason *,Zachary Kingston ∗和Lydia E. Kavraki。ICRA 2024, *表示同等的贡献。2。随机隐式神经签名的距离功能,用于在感知不确定性下安全运动计划。Carlos Quintero-Peña,Wil Thomason,Zachary Kingston和Lydia E. Kavraki。ICRA 2024。3。通过负担得起的抽象技能的动态基础加速了长马计划。Khen Elemelech,Zachary Kingston,Wil Thomason,Moshe Y. Vardi和Lydia E. Kavraki。 ICRA 2024。 4。 对象通过模拟衍生的可行动作重新配置对象。 Yiyuan Lee,Wil Thomason,Zachary Kingston和Lydia E. Kavraki。 ICRA 2023。 5。 一种基于统一的采样方法,用于集成任务和运动计划。 Wil Thomason和Ross Knepper。 ISRR2019。 6。 社会动量:在动态多机构环境中可清晰导航的框架。 Christoforos Mavrogiannis,Wil Thomason,Ross Knepper。 HRI2018。 7。 零射门学习,以识别陌生的手势识别。 Wil Thomason和Ross Knepper。 ISER2016。Khen Elemelech,Zachary Kingston,Wil Thomason,Moshe Y. Vardi和Lydia E. Kavraki。ICRA 2024。4。对象通过模拟衍生的可行动作重新配置对象。Yiyuan Lee,Wil Thomason,Zachary Kingston和Lydia E. Kavraki。 ICRA 2023。 5。 一种基于统一的采样方法,用于集成任务和运动计划。 Wil Thomason和Ross Knepper。 ISRR2019。 6。 社会动量:在动态多机构环境中可清晰导航的框架。 Christoforos Mavrogiannis,Wil Thomason,Ross Knepper。 HRI2018。 7。 零射门学习,以识别陌生的手势识别。 Wil Thomason和Ross Knepper。 ISER2016。Yiyuan Lee,Wil Thomason,Zachary Kingston和Lydia E. Kavraki。ICRA 2023。5。一种基于统一的采样方法,用于集成任务和运动计划。Wil Thomason和Ross Knepper。 ISRR2019。 6。 社会动量:在动态多机构环境中可清晰导航的框架。 Christoforos Mavrogiannis,Wil Thomason,Ross Knepper。 HRI2018。 7。 零射门学习,以识别陌生的手势识别。 Wil Thomason和Ross Knepper。 ISER2016。Wil Thomason和Ross Knepper。ISRR2019。6。社会动量:在动态多机构环境中可清晰导航的框架。Christoforos Mavrogiannis,Wil Thomason,Ross Knepper。HRI2018。7。零射门学习,以识别陌生的手势识别。Wil Thomason和Ross Knepper。 ISER2016。Wil Thomason和Ross Knepper。ISER2016。ISER2016。
国际商业策略模块介绍和...
欢迎来到国际商业战略模块。在瞬息万变的世界中,跨国经营的公司越来越成为常态——服务于本地市场的国内企业往往比那些在世界各地寻找有利机会的企业规模更小、创新性更低、利润更低。另一方面,陌生的领域存在更大的风险,需要智慧来评估市场、资本需求、融资方法、风险、营销技术和组织形式,以便抓住机遇。