XiaoMi-AI文件搜索系统
World File Search System雷达数据
雷达和雷达数据的质量信息 - KNMI
EUMETNET OPERA 计划第二阶段(2004-2006 年)的工作计划包含一个工作包 1.2,即“雷达和雷达数据的质量信息”。四个不同的国家气象研究所组成的联盟致力于该项目,并解决了这个复杂的项目主题。此外,该项目的成果还获得了欧洲的广泛支持。水文和 NWP 建模社区对气象雷达的兴趣日益浓厚,已开始从以定性为主向定量为主的雷达数据使用转变。对于传统的临近预报用途,主要必须满足定性要求,但对于定量降水估计(QPE)或 NWP 模型中的同化,通常有严格的定量要求。在之前的 OPERA 计划中,项目成员负责“产品质量描述符定义”项目(Holleman 等人,2002 年)。该项目回顾了观测技术的物理问题,提出了解决技术固有局限性(如杂波和光束阴影)的方法,并定义了一组 BUFR 描述符来编码推荐的质量信息。该项目仅处理全局(静态)质量描述符,即对产品中的所有数据都有效的描述符。Daniel Michelson 和 Iwan Holleman 参与了 COST-717 中的数据质量项目,该项目涉及

使用 ... 从激光雷达数据生成 DTM
摘要 本研究的目的是分析开源 (OS) 软件中的过滤方法是否适用于使用光检测和测距 (LiDAR) 数据生成数字地形模型 (DTM)。DTM 是地面地形的数字表示。它可以通过使用 OS 软件或商业软件对点云进行过滤来生成。OS 软件是计算机软件,用户可以通过互联网免费下载。以槟城亚依淡为研究区域,使用 LiDAR OS 软件(即机载 LiDAR 数据处理和分析工具 (ALDPAT))处理该地区的 LiDAR 数据。ALDPAT 中的五种不同过滤器分别用于过滤相同的 LiDAR 数据。此外,还使用商业软件 TerraScan 来处理相同的数据,因为该软件能够生成高质量的 DTM,并且通常由马来西亚测绘部 (DSMM) 使用。通过将 ALDPAT 生成的 DTM 与 TerraScan 获得的 DTM 进行比较来评估其质量。使用了两种方法:首先,检测差异并消除包含明显差异的结果。其次,对差异不易检测的结果使用三维 (3D) 偏差法。高程阈值扩展窗口 (ETEW) 过滤器生成的 DTM 与 TerraScan 生成的 DTM 几乎相似,标准偏差为 47 毫米。关键词:DTM、LiDAR、过滤器、Open So

利用激光雷达数据呈现农业区数字地形模型
数据记录接收器、惯性导航系统 (INS)、定位飞行轨迹系统 (GPS)、摄像机、飞行计划和管理系统以及地面参考站 GPS 和数据处理站。测距系统、GPS 和 INS 的集成和相互配合允许获得足够密集的“点云”(具有已知坐标 X、Y、Z 的空间点),以获得代表地形表面及其覆盖物的三维空间。使用摄像机记录扫描区域可以在激光雷达数据的后处理过程中简化“点云”过滤过程。为了消除系统误差,建议使用坐标 X、Y、Z 的校正值,这些校正值是使用具有至少三倍更精确空间坐标的控制点计算的,例如:运动场表面(Tarek,2002 年)。

基于形态学的机载激光雷达数据建筑物检测
摘要 激光雷达(lidar)技术的出现为三维建筑物检测提供了有前途的资源。由于去除植被的困难,大多数建筑物检测方法将激光雷达数据与多光谱图像融合以获取植被指数,而仅使用激光雷达数据的方法相对较少。然而,融合过程可能会导致分辨率和时间差异、阴影和高层建筑位移问题以及地理参考过程引入的误差。本研究提出了一种形态建筑物检测方法,通过逐步去除非建筑物像素来识别建筑物。首先,地面过滤算法将地面像素与建筑物、树木和其他物体分离。然后,分析方法使用大小、形状、高度、建筑物元素结构以及第一次和最后一次返回之间的高度差去除剩余的非建筑物像素。实验结果表明,该方法在奥斯汀市区的研究地点取得了不错的效果,总体准确率达到 95.46%。
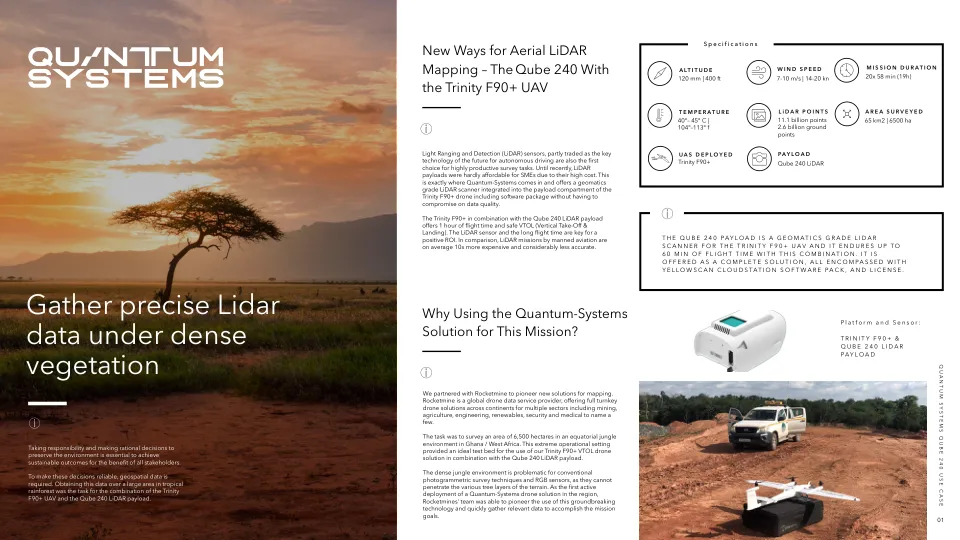
在茂密的植被下收集精确的激光雷达数据
我们与 Rocketmine 合作,开创了新的测绘解决方案。Rocketmine 是一家全球无人机数据服务提供商,为多个行业提供跨大洲的全套交钥匙无人机解决方案,包括采矿、农业、工程、可再生能源、安全和医疗等。这项任务是在加纳/西非赤道丛林环境中勘测 6,500 公顷的区域。这种极端的操作环境为我们的 Trinity F90+ VTOL 无人机解决方案与 Qube 240 LiDAR 有效载荷的组合提供了理想的试验平台。茂密的丛林环境对传统的摄影测量测量技术和 RGB 传感器来说是个问题,因为它们无法穿透地形的各个树层。作为 Quantum-Systems 无人机解决方案在该地区首次积极部署,Rocketmines 团队能够率先使用这项突破性技术并快速收集相关数据以完成任务目标。

机载激光雷达数据中的物体检测...
在化石燃料市场价格上涨的时代,为了满足气候变化日益严重的环境和经济问题,可再生能源必须在全球能源供应中发挥重要作用。本文重点介绍一种利用机载激光雷达数据全自动评估屋顶平面太阳能潜力的新方法,并使用完整的 3D 信息进行屋顶平面检测和太阳能潜力分析。基于图像的候选区域检测算法减少了点云的数据量,并识别出包含建筑物的潜在区域,完整性较高(97%)。从建筑物候选区域中提取三维屋顶平面,并计算其方位和坡度。在 3D 点云内计算每个屋顶平面的地平线,从而以适当的方式尊重附近物体(如植被、屋顶、烟囱、天窗等)的阴影效果。与墙壁或建筑物等其他物体相比,植被具有透明特性。因此,下一步是在剩余的非屋顶点内检测植被,并通过计算每个树段平均的局部透明度测量值来引入透明阴影值。对规则分布的屋顶点进行以下太阳能潜力分析,结果包括:(i) 每个屋顶平面的直接辐射和散射辐射的年总和,以及 (ii) 有关一个屋顶内辐射分布的详细信息。通过计算晴空指数,使用来自附近气象地面站的数据考虑云量效应。

从大规模雷达数据中高效提取排水网络...
摘要。现代遥感技术获取的全球和区域高程数据集的可用性为显著提高河流测绘的准确性提供了机会,尤其是在偏远、难以到达的地区。从数字高程模型 (DEM) 中提取河流基于流量累积计算,这是一个汇总参数,当应用于遥感技术生成的大型、嘈杂的 DEM 时,会带来性能和准确性挑战。对 DEM 洼地的稳健处理对于从此类数据中可靠地提取连接的排水网络至关重要。在 GRASS GIS 中作为模块 r.watershed 实现的最低成本流量路由方法经过重新设计,以显著提高其速度、功能和内存要求,并使其成为从大型 DEM 进行河流测绘和流域分析的有效工具。为了评估其对大型洼地(典型的遥感 DEM)的处理能力,我们比较了三种不同的方法:传统洼地填充法、影响减少法和最小成本路径搜索法。比较使用航天飞机雷达地形任务 (SRTM) 和干涉合成孔径雷达高程 (IFSARE) 数据集进行,这些数据集分别覆盖巴拿马中部,分辨率为 90 米和 10 米。精度评估基于 GPS 获取的地面控制点和从选定巴拿马河流沿岸的 Landsat 影像数字化的参考点。结果表明,最小成本路径方法的新实现比原始版本快得多,可以处理大量数据集,并根据参考点验证的河流位置提供最准确的结果。

使用分层 K 函数进行激光雷达数据分类 ...
使用分层 K 均值聚类的激光雷达数据分类 Nesrine Chehata a,b , Nicolas David b , Frédéric Bretar b a Institut EGID - Université Bordeaux 3 - Equipe GHYMAC Allée Daguin 33607 Pessac- Nesrine.Chehata@egid.u-bordeaux3.fr乙国家地理研究所 - MATIS Av. 实验室Pasteur 94165 St. Mandé cedex, France- nicolas.david@ign.fr, frederic.bretar@ign.fr Commission III, WG III/3 关键词:遥感、LIDAR、层次分类、DTM、多分辨率 摘要:本文涉及使用激光雷达点云过滤和分类来建模地形,更一般地用于场景分割。在本研究中,我们建议使用众所周知的 K 均值聚类算法来过滤和分割(点云)数据。K 均值聚类非常适合激光雷达数据处理,因为可以根据所需的类别使用不同的特征属性。当仅处理 3D 点云时,属性可能是几何或纹理的,但当联合使用光学图像和激光雷达数据时,属性也可能是光谱的。该算法基于固定的邻域大小,可以处理植被茂密的陡峭地貌、山区区域和呈现微地形的地形。我们的算法的新颖之处在于提供分层分割聚类来提取地面点。聚类分割的数量用于自动限定分类可靠性。这一点在以前的工作中很少被处理。此外景观< /div>

Mark 92 改进型 6 火控系统和 APL 的相干雷达数据程序
1985 年,Russell Rzemien、Jay F. Roulette 和 Paul R. Bade 设计了最初的 MK 92 MOD 6 CDC。CDC 记录雷达回波的同相和正交分量,以及其他相关雷达信息。雷达制造商构建了定制的雷达接口板,从 FCS 中提取所需的雷达信号。CDC 能够与 CAS 搜索、CAS 跟踪或 STIR 接口。CDC 一次只能从其中一个雷达收集数据。最初,数据存储在缓冲区中,然后传输到九轨磁带上。几年后,原来的磁带驱动器被更快、更密集的 8 毫米磁带驱动器取代,从而可以记录更多的数据。由于数据传输到磁带的速度不能像从雷达接收数据那样快,因此只能记录一部分数据。在收集搜索数据时,仅记录操作员指定的范围和方位有限的扇区内的数据。最初,扇区大小不能比 10 ° x 15 mi 大太多,具体取决于雷达波形。在收集轨迹数据时,CDC 会在指定的时间内连续收集数据,然后将数据下载到磁带并重复该循环。当 CDC 将数据下载到磁带时,不会记录雷达在此期间发送的轨迹数据。多年来,CDC 用于许多数据收集练习和测试活动。虽然用于 CAS 搜索收集的扇区大小相对较小,并且可收集轨迹数据的时间相对较短,但事实证明这些数据非常有用。困扰 MOD 6 系统的问题之一是,如果没有大型 CAS 搜索收集扇区,则很难进行分析。为了充分描述问题并评估所提出的方法,需要一个至少为 25 ° x 全范围的扇区大小。更大的收集扇区需要设计和构建新的 MOD 6 CDC。 Russell Rzemien、Ronald J. Clevering、Brian A. Williamson 和 Daryl I. Tewell 于 1994 年设计并建造了新的 MOD 6 CDC。雷达和 CDC 之间的接口保持不变。新的 CDC 利用
Mark 92 改进型 6 火控系统和 APL 的相干雷达数据程序
1985 年,Russell Rzemien、Jay F. Roulette 和 Paul R. Bade 设计了最初的 MK 92 MOD 6 CDC。CDC 记录雷达回波的同相和正交分量,以及其他相关雷达信息。雷达制造商构建了定制的雷达接口板,从 FCS 中提取所需的雷达信号。CDC 能够与 CAS 搜索、CAS 跟踪或 STIR 接口。CDC 一次只能从其中一个雷达收集数据。最初,数据存储在缓冲区中,然后传输到九轨磁带上。几年后,原来的磁带驱动器被更快、更密集的 8 毫米磁带驱动器取代,从而可以记录更多的数据。由于数据传输到磁带的速度不能像从雷达接收数据那样快,因此只能记录一部分数据。在收集搜索数据时,仅记录操作员指定的范围和方位有限的扇区内的数据。最初,扇区大小不能比 10 ° x 15 mi 大太多,具体取决于雷达波形。在收集轨迹数据时,CDC 会在指定的时间内连续收集数据,然后将数据下载到磁带并重复该循环。当 CDC 将数据下载到磁带时,不会记录雷达在此期间发送的轨迹数据。多年来,CDC 用于许多数据收集练习和测试活动。虽然用于 CAS 搜索收集的扇区大小相对较小,并且可收集轨迹数据的时间相对较短,但事实证明这些数据非常有用。困扰 MOD 6 系统的问题之一是,如果没有大型 CAS 搜索收集扇区,则很难进行分析。为了充分描述问题并评估所提出的方法,需要一个至少为 25 ° x 全范围的扇区大小。更大的收集扇区需要设计和构建新的 MOD 6 CDC。 Russell Rzemien、Ronald J. Clevering、Brian A. Williamson 和 Daryl I. Tewell 于 1994 年设计并建造了新的 MOD 6 CDC。雷达和 CDC 之间的接口保持不变。新的 CDC 利用