XiaoMi-AI文件搜索系统
World File Search System飞行区域

3d 战斗气象中队脆弱的解释
RGAAF/HAAF、Longhorn/Shorthorn 辅助机场、R6302、训练区、靶场(即 Crittenberger 靶场)、着陆跑道(即着陆跑道 Cold Springs (LSCS) 和着陆跑道 50 (LS50) 的 UAS 操作)、空投/着陆区、前方武装和加油点 (FARP)(即 FARP 西和 FARP 东)等。– 维护测试飞行区域 III、IV、V 和 VI(FH Reg 95-1) – 西部训练区 (WTA)(FH Reg 95-1)
航空安全信函 - 加拿大交通部
作为飞行员,我们的工作是降低风险。无人机是国家民用航空运输系统的新成员,因此,它们的出现带来了新的风险:无人机与传统航空之间的碰撞。无人机飞行员有责任远离传统飞机的飞行区域,并保持无人机的控制和视线,以便在检测到另一架飞机时能够立即采取行动让路。然而,传统飞机的飞行员应该了解为无人机操作创建的 CAR 第 IX 部分的操作环境,这样他们就可以以进一步降低风险的方式规划飞行。避免碰撞是所有飞行员共同的责任。为了进一步降低碰撞风险,传统飞机的飞行员应避免在非管制空域飞行 400 英尺 AGL 以下,并在未经认证的机场飞行标准航线时格外小心,因为其他空域用户会期望飞机在那里飞行。

LFDN - 罗什福尔 滨海夏朗德省
区域图 22.1 区域图 22.1 参见 AD 2 LFBH ARC 01。无线电通信故障 22.2 无线电通信故障板 22.2 在 VMC 起飞时:半转弯降落在 AD 上或继续飞行到适当的 AD。在 VMC 中起飞时:掉头降落在机场或继续飞往合适的机场。在 IMC 出发时:继续飞行直到最后指定 FL 的 TMA 限制,然后开始爬升至飞行计划中指示的巡航 FL。在仪表气象条件 (IMC) 下出发:继续飞行至最后指定的飞行高度层的终端飞行区域 (TMA) 限制,然后开始爬升至飞行计划中指示的巡航飞行高度层。到达时若错过 APCH:执行新的 APCH。如果不成功,则爬升至 2500 英尺并按照 RDL 345° BMC(MAG 165°)清除 TMA,以寻求 VMC 条件。
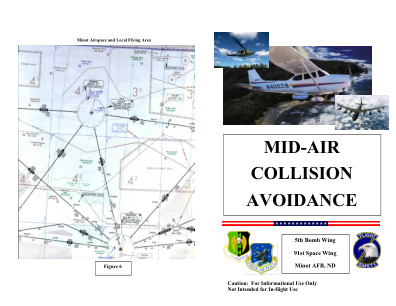
空中防撞 - 迈诺特空军基地
迈诺特空军基地位于 83 号公路旁,这是北达科他州的主要南北公路之一。这条公路也是穿越该州中部的空中交通的飞行路线。空军基地周围有许多小型机场(见图 6,注意:本手册中的图表摘录自分区图和国防部仪表进近图,仅供参考。它们不适用于飞行中。),其中大多数飞行都使用目视飞行规则 (VFR)。为了帮助飞机安全分离,迈诺特进近管制中心在当地飞行区域提供飞行跟踪。图 2、3 和 4 描绘了迈诺特空军基地附近军用飞机通常使用的飞行路径。特别重要的是位于迈诺特 D 级空域内的区域(见比林斯分区图)。在飞越距机场 5.2 海里以内的 2500 英尺高程 (或 4168 英尺平均海平面) 以下的该区域之前,所有飞行员都必须联系迈诺特空军基地控制塔,并在指定空域内飞行时与其保持无线电联系。

在混乱的海洋环境中用于多USV采样任务的不间断路径计划系统
摘要 - 本文提出了一个不间断的无碰撞路径计划系统,可在海洋采样任务中促进多个无人地面车辆(USV)的操作性。根据新型B-Spline数据框和粒子群优化(PSO)基于基于的求解器引擎的集成,开发了所提出的不间断的路径计划系统。新的B-Spline数据框架结构提供了候选点的智能采样,而无需完全停止完成采样任务。这使USV可以平稳地环绕该区域,同时校正朝着下一个位置的朝向角度,并防止车辆朝向的急剧变化。然后,优化引擎为多个USV生成了最佳,平滑和约束意识的路径曲线,以从开始点到会议点进行采样任务。生成的路径在车辆的速度轮廓上结合了可控性,以防止经历零速度和频繁停止/开始切换控制器。为了实现优化程序的更快收敛,提出了合适的搜索空间分解方案。进行了模拟逼真的海洋采样任务的广泛模拟研究,以检查拟议的路径计划系统的可行性和有效性。这封装了建模在班达海中印尼群岛的现实海事环境,包括海浪,障碍和无飞行区域,并引入了几个性能指数,以基于路径计划系统的性能进行基准测试。此过程伴随着对拟议的路径计划系统进行的比较研究,并具有众所周知的最先进的片段,快速探索随机树(RRT)和基于差异进化的路径计划算法。模拟的结果证实了对不间断的海洋采样任务的拟议路径计划系统的适用性和鲁棒性。

塞斯纳 T-303 Crusader 垂直尾翼飞行疲劳裂纹扩展监测 Eric v. K. Hill 1 和 Christopher L. Rovik 2
1 Aura Vector Consulting,3041 Turnbull Bay Road,New Smyrna Beach,FL 32168 2 Toyota Technical Center,8777 Platt Road,Saline,MI 48176 摘要 本研究涉及对 Cessna T-303 Crusader 双引擎飞机垂直尾翼疲劳裂纹扩展的飞行中监测。在实验室中对带凹槽的 7075-T6 铝制飞机槽梁支撑结构进行了周期性测试。在这些疲劳测试期间采集了声发射 (AE) 数据,随后将其分为三种故障机制:疲劳开裂、塑性变形和摩擦噪声。然后使用这些数据来训练 Kohonen 自组织映射 (SOM) 神经网络。此时,在 T-303 飞机垂直尾翼的肋骨之间安装了类似的槽梁支撑结构作为冗余结构构件。随后从初始滑行和起飞到最终进近和着陆收集 AE 数据。然后使用实验室训练的 SOM 神经网络将飞行测试期间记录的 AE 数据分类为上述三种机制。由此确定塑性变形发生在所有飞行区域,但在滑行操作期间最为普遍,疲劳裂纹扩展活动主要发生在飞行操作期间 - 特别是在滚转和荷兰滚机动期间 - 而机械摩擦噪声主要发生在飞行期间,在滑行期间很少发生。SOM 对故障机制分类的成功表明,用于老化飞机的原型飞行结构健康监测系统在捕获疲劳裂纹扩展数据方面非常成功。可以设想,在老化飞机中应用此类结构健康监测系统可以警告即将发生的故障,并在需要时而不是按照保守计算的间隔更换零件。因此,继续进行这项研究最终将有助于最大限度地降低维护成本并延长老化飞机的使用寿命。关键词:老化飞机,飞行中疲劳裂纹监测,Kohonen自组织映射,神经网络,结构健康监测 简介 飞机疲劳开裂 如今,飞机的使用寿命通常比汽车更长。这是由于许多因素造成的,包括飞机的成本、政府法规以及故障的严重后果。由于飞机的使用寿命预期如此之长,因此引发了许多问题。问题的主要根源可能是疲劳裂纹的存在和增长,这也是本研究的主题。修复疲劳裂纹造成的损坏的能力一直不是问题,但疲劳裂纹增长的检测和监测已被证明是一个真正的挑战。疲劳开裂是由于低于正常延展性金属的屈服强度的循环载荷导致的脆性断裂。裂纹尖端的高度集中应力导致在裂纹前方形成心形塑性变形区。该塑性区应变随着循环载荷而硬化,当金属的延展性耗尽时会断裂
塞斯纳 T-303 飞行中疲劳裂纹扩展监控...
1 Aura Vector Consulting,3041 Turnbull Bay Road,New Smyrna Beach,FL 32168 2 Toyota Technical Center,8777 Platt Road,Saline,MI 48176 摘要 本研究涉及对 Cessna T-303 Crusader 双引擎飞机垂直尾翼疲劳裂纹扩展的飞行中监测。在实验室中对带凹槽的 7075-T6 铝制飞机槽梁支撑结构进行了周期性测试。在这些疲劳测试期间采集了声发射 (AE) 数据,随后将其分为三种故障机制:疲劳开裂、塑性变形和摩擦噪声。然后使用这些数据来训练 Kohonen 自组织映射 (SOM) 神经网络。此时,在 T-303 飞机垂直尾翼的肋骨之间安装了类似的槽梁支撑结构作为冗余结构构件。随后从初始滑行和起飞到最终进近和着陆收集 AE 数据。然后使用实验室训练的 SOM 神经网络将飞行测试期间记录的 AE 数据分类为上述三种机制。由此确定塑性变形发生在所有飞行区域,但在滑行操作期间最为普遍,疲劳裂纹扩展活动主要发生在飞行操作期间 - 特别是在滚转和荷兰滚机动期间 - 而机械摩擦噪声主要发生在飞行期间,在滑行期间很少发生。SOM 对故障机制分类的成功表明,用于老化飞机的原型飞行结构健康监测系统在捕获疲劳裂纹扩展数据方面非常成功。设想在老化飞机中应用此类结构健康监测系统可以警告即将发生的故障,并在需要时而不是按照保守计算的间隔更换零件。因此,继续进行这项研究最终将有助于最大限度地降低维护成本并延长老化飞机的使用寿命。关键词:老化飞机,飞行中疲劳裂纹监测,Kohonen自组织映射,神经网络,结构健康监测 简介 飞机疲劳开裂 如今,飞机的使用寿命通常比汽车更长。这是由于许多因素造成的,包括飞机的成本、政府法规以及故障的严重后果。由于飞机的使用寿命预期如此之长,因此引发了许多问题。问题的主要来源,也是本研究的主题,可能是疲劳裂纹的存在和增长。修复疲劳裂纹造成的损坏的能力一直不是问题,但疲劳裂纹增长的检测和监测已被证明是一个真正的挑战。疲劳开裂是由于低于正常延展性金属的屈服强度的循环载荷导致的脆性断裂。裂纹尖端的高度集中应力导致在裂纹前方形成心形塑性变形区。该塑性区应变随着循环载荷而硬化,当金属的延展性耗尽时会断裂