XiaoMi-AI文件搜索系统
World File Search System飞行方向

第九部分:摄影测量控制测量
相机放置在相机支架上,该支架牢固地固定在飞机的机身上。支架具有隔振器,可吸收飞行中飞机固有的振动。振动会使图像模糊,并降低图片的可解释性。此外,支架还具有万向节系统,使摄影师能够适应飞机的俯仰和偏航并补偿航向。由于风的原因,飞机通常必须将航向稍微转向侧风以保持恒定的飞行方向。航向和实际飞行方向之间的差异称为偏航角。消除偏航可获得与飞行方向正确定向的图像,这是摄影测量任务所必需的。
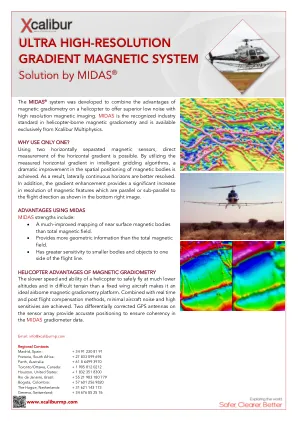
超高分辨率梯度磁系统
可以测量水平梯度。通过在智能网格算法中利用测量的水平梯度,可以显著改善磁体的空间定位。因此,可以更好地分辨横向连续的地平线。此外,梯度增强可以显著提高与飞行方向平行或次平行的磁特征的分辨率,如右下图所示。使用 MIDAS 的优势 MIDAS 的优势包括:
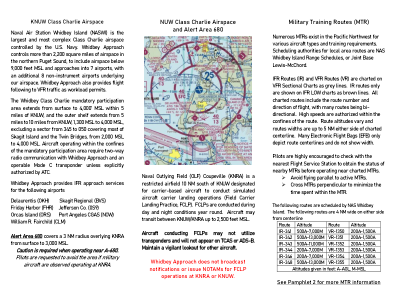
NUW 查理级空域和 680 警戒区军事...
军事训练航线 (MTR) 太平洋西北地区有许多 MTR,可供各种飞机类型和训练要求使用。当地航线的调度机构是 NAS 惠德贝岛靶场时间表或刘易斯-麦科德联合基地。IFR 航线 (IR) 和 VFR 航线 (VR) 在 VFR 分区图上以灰线绘制。只有 IR 航线在 IFR LOW 图上显示为棕线。所有绘制的航线都包括航线编号和飞行方向,其中许多航线是双向的。在航线范围内允许高速飞行。航线高度各不相同,航线宽度在绘制中心线两侧最多 5 海里。许多电子飞行包 (EFB) 仅描绘航线中心线,而不显示宽度。强烈建议飞行员在绘制的 MTR 附近飞行前,先咨询最近的飞行服务站,以获取附近 MTR 的状态。

利用高次谐波桨叶间距减少直升机振动
高次谐波桨距长期以来一直是一种有吸引力但尚未开发的方法,用于减少振动转子载荷和由此产生的机身振动。这个概念很简单。大多数直升机振动源于转子叶片在方位角周围旋转时遇到的不均匀速度分布。这种不均匀分布是由于叶片相对于飞行方向不断变化和转子下方不规则的涡流尾流造成的。由此产生的叶片攻角随方位角的变化包含转子轴速度的每个谐波。然而,只有某些谐波会引起振动载荷并传递到机身。许多谐波会在各个叶片上产生载荷,这些载荷在轮毂处完全相互抵消。高次谐波叶片螺距叠加在传统的零和每转一的叶片螺距控制上,是一种选择性控制攻角谐波的方法。•会产生振动,
利用高次谐波桨叶间距减少直升机振动
高次谐波桨距长期以来一直是一种有吸引力但尚未开发的方法,用于减少振动转子载荷和由此产生的机身振动。这个概念很简单。大多数直升机振动源于转子叶片在方位角周围旋转时遇到的不均匀速度分布。这种不均匀分布是由于叶片相对于飞行方向不断变化和转子下方不规则的涡流尾流造成的。由此产生的叶片攻角随方位角的变化包含转子轴速度的每个谐波。然而,只有某些谐波会引起振动载荷并传递到机身。许多谐波会在各个叶片上产生载荷,这些载荷在轮毂处完全相互抵消。高次谐波叶片螺距叠加在传统的零和每转一的叶片螺距控制上,是一种选择性控制攻角谐波的方法。•会产生振动,
利用高次谐波桨叶间距减少直升机振动
高次谐波桨距长期以来一直是一种有吸引力但尚未开发的方法,用于减少振动转子载荷和由此产生的机身振动。这个概念很简单。大多数直升机振动源于转子叶片在方位角周围旋转时遇到的不均匀速度分布。这种不均匀分布是由于叶片相对于飞行方向不断变化和转子下方不规则的涡流尾流造成的。由此产生的叶片攻角随方位角的变化包含转子轴速度的每个谐波。然而,只有某些谐波会引起振动载荷并传递到机身。许多谐波会在各个叶片上产生载荷,这些载荷在轮毂处完全相互抵消。高次谐波叶片螺距叠加在传统的零和每转一的叶片螺距控制上,是一种选择性控制攻角谐波的方法。•会产生振动,
利用高次谐波桨叶间距减少直升机振动
高次谐波桨距长期以来一直是一种有吸引力但尚未开发的方法,用于减少振动转子载荷和由此产生的机身振动。这个概念很简单。大多数直升机振动源于转子叶片在方位角周围旋转时遇到的不均匀速度分布。这种不均匀分布是由于叶片相对于飞行方向不断变化和转子下方不规则的涡流尾流造成的。由此产生的叶片攻角随方位角的变化包含转子轴速度的每个谐波。然而,只有某些谐波会引起振动载荷并传递到机身。许多谐波会在各个叶片上产生载荷,这些载荷在轮毂处完全相互抵消。高次谐波叶片螺距叠加在传统的零和每转一的叶片螺距控制上,是一种选择性控制攻角谐波的方法。•会产生振动,

无人机获取的图像对 alt 数字地形模型的重叠影响
摘要 摄影测量数据在多个领域被系统地使用。数字地形模型 (DTM) 等产品提供了详细的表面信息,但与 GNSS RTK 地形测量收集的数据相比,这些产品的几何可靠性值得怀疑。本研究评估了使用无人机 (UAV) 在不同参数、重叠百分比和飞行方向获得的 DTM 的质量,并将结果与地形方法全球导航卫星系统 - 实时动态 (GNSS RTK) 的结果进行比较。制定了 12 个飞行计划,具有不同的重叠度(90x90、80x80、80x60、70x50、70x30 和 60x40%)和方向(横向和纵向于种植线)。高度(地面以上 - AGL)和速度参数分别固定在 90 m 和 3 m/s,所有飞行的地面采样距离 (GSD) 均为 0.1 m。总体来看,横向重叠度70x50%的飞行效果最好,总处理时间为12分17秒(比90x90%快了大约1.5小时),均方根误差(RMSE)为0.589米,满足60x30%航空摄影测量所要求的最小重叠度,且与90x90%和80x80%的高重叠度在统计上并无差异。
无人机获取的图像对 alt 数字地形模型的重叠影响
摘要 摄影测量数据在多个领域被系统地使用。数字地形模型 (DTM) 等产品提供了详细的表面信息,但与 GNSS RTK 地形测量收集的数据相比,这些产品的几何可靠性值得怀疑。本研究评估了使用无人机 (UAV) 在不同参数、重叠百分比和飞行方向获得的 DTM 的质量,并将结果与地形方法全球导航卫星系统 - 实时动态 (GNSS RTK) 的结果进行比较。制定了 12 个飞行计划,具有不同的重叠度(90x90、80x80、80x60、70x50、70x30 和 60x40%)和方向(横向和纵向于种植线)。高度(地面以上 - AGL)和速度参数分别固定在 90 m 和 3 m/s,所有飞行的地面采样距离 (GSD) 均为 0.1 m。总体来看,横向重叠度70x50%的飞行效果最好,总处理时间为12分17秒(比90x90%快了大约1.5小时),均方根误差(RMSE)为0.589米,满足60x30%航空摄影测量所要求的最小重叠度,且与90x90%和80x80%的高重叠度在统计上并无差异。
Leica ADS L1 SDK 用户手册 - swisstopo
锚点 地理坐标系中 LSR 的原点,参考椭球为 WGS84 [弧度] CCD 线 电荷耦合器件 (CCD,感光硬件设备) 的线 DEM 数字高程模型表示 3D 表面或地形模型。未定义是否包含建筑物或树木。 DSM 数字表面模型表示高程的 3D 模型(网格),表面有建筑物和树木等物体。 DSNU 暗信号非均匀性。即使没有光线照射到每个像素上,每个像素也会“提供”一个灰度值。对于校正,使用未曝光的图像,即所谓的暗图像。 DTM 数字地形模型表示没有建筑物和树木等物体的 3D 表面模型。 ECEF 空间直角坐标系,以地球为中心、地球固定的坐标系 EOP 外部方向参数,主要是 x、y、z 和 omega、phi、kappa。描述 3D 坐标系中的传感器位置和方向。 L0 原始数据通过辐射校准进行校正,完全没有进行几何校准。无法通过 SDK 访问。L1 几何校正的 L0 图像,校正到给定平面。L1 带 DEM 校正 平滑的 EOP 并使用 DEM 进行校正。L2 正射影像 纬度 φ 从赤道测量,以北为正 经度 λ 从 0 子午线(格林威治)测量,以东为正 LSR 局部空间直角坐标系,另请参阅 ECEF 线数 飞行方向上的线数 样本数 飞行路线或图像中图像坐标的像素数