XiaoMi-AI文件搜索系统
World File Search System馈通

减轻驾驶舱触摸屏的生物动力馈通
摘要 生物动力馈通 (BDFT) 是未来驾驶舱触摸屏操作的一个关键问题,因为湍流导致的驾驶舱加速使飞行员容易受到错误触摸的影响,从而影响任务执行。本研究重点是实施基于软件的取消方法,以减轻 BDFT 在触摸屏拖动任务中的不利影响。进行了一项有 18 名参与者的飞行模拟器实验,以估计主飞行显示器上水平和垂直触摸输入的 BDFT 动力学模型。平均 BDFT 模型用于在用于模型识别的相同连续拖动任务和离散点对点拖动任务中取消 BDFT。虽然对于连续任务,取消使 BDFT 缓解了 63%,但由于 BDFT 敏感性降低,同样的取消对于离散任务无效。总体而言,结果表明,虽然基于模型的 BDFT 取消可能非常有效,但一个关键的技术挑战是确保它具有足够的任务自适应性。


壹账通金融科技有限公司 - :: HKEX :: HKEXnews ::
我们是中国金融服务行业的技术即服务提供商,国际业务不断拓展。我们为金融服务行业的各类参与者提供软件,并收取前期实施费用和持续的交易费用。根据 CIC 的数据,就 2020 年金融软件和服务收入而言,我们在中国上市的技术即服务提供商中排名第二,占总市场份额的 5.7%。我们为金融机构客户提供基于软件的技术解决方案,帮助他们加快数字化转型并确保其可持续性。我们相信,“技术 + 业务”模式是我们的关键竞争优势,也是我们赢得新业务和与客户互动的驱动力。通过将我们丰富的金融行业专业知识与针对行业需求量身定制的技术相结合,我们不仅提供经过验证的解决方案,还使我们的金融机构客户能够将技术应用于复杂的行业特定业务场景,从而简化客户的数字化流程。这种方法使我们的客户能够提高效率,提高服务质量,降低成本并降低风险。自我们成立以来,中国 100% 的大型和股份制银行、98% 的城市商业银行、63% 的财产保险公司和 49% 的人寿保险公司都使用过我们的至少一款产品。除了金融机构外,我们的客户还包括金融服务行业的其他服务提供商。

药品给付规定通则
与克隆氏症病患使用eTanercept,adalimumab,abatacept,tocilizumab,centerlizumab,brodalumab,brodalumab等生物制剂皮下注射剂,经事前审查,在医师指导下(删除)(109/12/1)21。(刪除) (109/12/1) 22.含teriparatide 成分注射劑。(103/9/1) 23.含interferon beta-1a 成分注射劑。(103/9/1) 24.含interferon beta-1b 成分注射劑。(103/9/1) 25.含glatiramer 成分注射劑。(103/9/1) 26.Fondaparinux (如(Arixtra)用于静脉血栓高危险病患,接受人工髋或膝关节

2024年4月期 通期決算説明会
本介绍材料由Astroscale Holdings Inc.(以下简称“公司”或“ Astroscale”)编写。本演示材料包含基于我们当前的期望,估计和预测的陈述,对我们的前瞻性陈述和计划。这些陈述反映了我们的假设和前景,截至本演讲材料或其他特定日期的日期。不能保证这些前瞻性陈述将被实现。由于多种因素,实际结果可能与这些声明中提出的结果有所不同,包括各种因素,包括变化或不利于我们的使命的运营,客户计划和需求的变化,竞争,法律和监管环境的变化以及其他因素的变化。因此,必须注意避免对这些陈述提出不当信任。除非适用法律或证券交易所规则和法规规定,否则该公司没有义务根据后续发展更新或修改本演讲材料中包含的信息。

General Award Programme 2019 v1 ... - 香港资讯及通讯科技奖
科技是我们日常生活中不可或缺的一部分,将继续对我们的社会和经济产生重大影响。自 2017 年 12 月发布《智慧城市蓝图》以来,政府一直在推出各种智慧城市计划。今年和明年,政府将与 ICT 行业合作推出更多计划。选择 ICT 作为职业无疑是我们年轻人最具战略性和前景的道路之一。我们需要具有创新思维的科技人才,让本地 ICT 行业继续蓬勃发展。
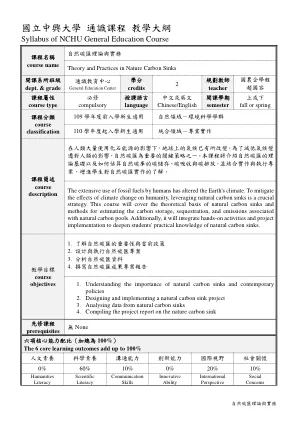
国立中兴大学通识课程教学大纲
Week 1: Introduction Week 2: The science of carbon cycle Week 3: Ecosystems as carbon sinks Week 4: Policies and global agreements Week 5: Climate Change Policy in Taiwan Week 6: Carbon inventory project development, implementation, and monitoring Week 7: Methods for estimating aboveground biomass and belowground biomass Week 8: Methods for estimating dead organic matter and soil Week 9: Mid-term exam Week 10: Project Proposal I Week 11: Project提案II第12周:实践和数据收集I第13周:实践和数据收集II第14周:最终项目演示文稿I第15周:最终项目演示文稿II第16周:实用挑战和解决方案第17周:自学习活动第18周:自学习活动

手动控制前馈的控制理论模型
控制车辆是许多人日常生活的一部分。了解人类如何控制车辆对于车辆及其与人类控制器的接口的设计尤为重要。它使工程师能够设计更快、更安全、更舒适、更节能、更通用、更好的车辆。尤其是现在,当自动化使我们能够以各种可以想象的方式支持人类控制器时,了解人类如何控制和与车辆交互非常重要。人类和自动化将动态共享对车辆的控制权。因此,自动化应该(至少!)围绕人类进行设计,但如果自动化的行为方式与人类的控制行为相似,那就更好了。如果自动化表现得像人类控制器,人类控制器就能更好地理解自动化的意图,从而提高安全性、增加舒适度并更容易被接受。人类控制器 (HC) 几乎总是控制着车辆以实现高级目标。为了实现这一高级目标,HC 需要连续执行大量较小的任务,这些任务通过向车辆提供“控制输入”来实现:转动方向盘、踩下油门、拉动直升机上的总杆、转动旋钮等。要理解高级目标和低级控制输入之间的关系,有助于