XiaoMi-AI文件搜索系统
World File Search System高度保持
定义 - 民航部
下列术语在《毛里求斯民航要求》中使用时,具有以下含义:异常航空器。测量的高度保持性能与在 RVSM 空域中运行的所有航空器测量的核心高度保持性能存在显著差异的航空器。从头开始。字面意思是“从头开始”。指学员事先不了解或不接触所教授的科目或活动。可用的加速停止距离 (ASDA)。可用的起飞滑跑距离加上停止道的长度(如有)。接受单位。下一个接管航空器的空中交通管制单位。注 — 参见“转移单位/管制员”的定义。事故。与航空器运行有关的事件,就载人航空器而言,发生在任何人登机准备飞行直到所有此类人员下机期间;就无人机而言,发生在航空器准备飞行直到飞行结束时停止并且主推进系统关闭期间,其中: (a) 人员因以下原因而致命或严重受伤: — 在航空器内,或 — 直接接触航空器的任何部分,包括
飞行员指南 改装自动驾驶仪系统
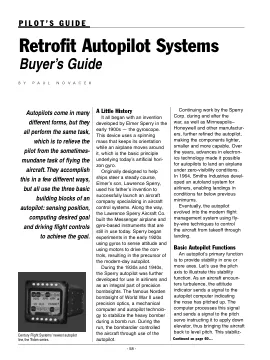
内置磁传感器在安装时校准,因此无需远程安装的通量传感器即可提供航向信息。DigiTrak 还可与转弯协调器(称为 Pictorial Pilot)配合使用,有 2 英寸和 3 英寸两种版本。通过为 DigiFlight II 添加俯仰通道,可以提高性能。2 英寸计算机/控制器采用更完整的显示、高度保持和 GPS 转向。DigiFlight II 的某些型号使用配平感应俯仰伺服器来发出配平不足的情况并控制垂直速度。


视觉锚定:利用视觉通过 UAS 绕目标运行...
符号 d tgt 到目标的欧几里德距离(斜距) DC 飞机与图像中心之间的地面半径 DX Y 轴截距与目标之间的地面距离 DY 飞机与 Y 轴截距之间的地面半径 DT 飞机与目标之间的地面半径 F b 机身框架连接到飞机 F c 相机框架连接到相机 F 中心 向心力 F n 北/东/下框架(惯性) g 地球重力加速度 h AGL 目标上方高度(地面以上) h des 所需轨道高度 KD φ 滚转内环微分增益 KD θ 俯仰内环微分增益 KD 外环微分增益 KI h 高度保持积分增益 KP h 高度保持比例增益 KP 外环外环控制器比例增益 KP ˙ ψ 转弯协调器比例增益 KP φ 滚转内环比例增益 KP θ 俯仰内环比例增益 LC 飞机与图像中心之间的斜距 LY 飞机与 Y 轴截距之间的斜距 LT飞机与目标之间的斜距 m 飞机质量 PE 位置向东 PN 位置向北 p 飞机倾斜率 q 飞机俯仰率 r 飞机航向(偏航)率 R 实际轨道半径 ˙ R 实际半径率 R des 所需轨道半径 S x 相机水平分辨率 S y 相机垂直分辨率 t 时间 VA 飞机空速 V CM / e 飞机相对于惯性系的速度 VW / e 风相对于惯性系的速度 V tgt / e 目标相对于惯性系的速度 W 飞机重量 X tgt 目标的 X 坐标 Y tgt 目标的 Y 坐标
Leonardo AW189,G-MCGT - GOV.UK
在完成其他计划中的训练后,机组将直升机设置为 FMS 引导的扇区搜索模式,并重新讲解了可能导致意外飞行路径振荡的开关选择。建议后方机组系好安全带以防万一。飞机在水面 1,000 英尺以上高度,已捕获高度保持 (ALT) 并配置了扇区搜索和 NGSPD。PM 选择 TD 模式后,飞机开始俯仰振荡。机组报告说,感觉“不舒服”,有较低的“g”力,但无法确定俯仰变化的程度,也无法确定主飞行显示器 (PFD) 上显示的模式,因为他们在事件发生时正在向外看。但是,根据他们的视觉感知,他们估计是机头上仰 20°,然后机头下俯 40°。在识别出飞机的异常飞行路径行为后,PF 取消了自动驾驶模式并让飞机恢复正常稳定飞行。
微型空射诱饵 (MALD) 和 MALD-Jammer ...
执行摘要 • 空军作战测试与评估中心 (AFOTEC) 于 2014 年 2 月完成了微型空射诱饵 - 干扰器 (MALD-J) 的全面任务级模拟测试。• 在 2014 财年,空军在作战环境中发射了 3 架 MALD-J 和 2 架 MALD 飞行器。• 对部队发展评估 (FDE) 的初步分析表明,MALD-J 导航精度存在持续问题。MALD-J 项目办公室已纳入软件升级以提高导航精度,但迄今为止的变化主要集中在提高导弹的高度保持能力,并且仅略微提高了导航精度。• 第 28 测试与评估中队目前正在执行 FDE,结合 MALD-J 可靠性评估计划任务,以评估 MALD-J 因软件升级而对导航精度的改进。• MALD 和 MALD-J IOT&E 的初步结果表明,空军对 MALD-J 的纠正措施提高了物资可靠性。

1 MILVIZ DHC2 Beaver Honeywell KAP 140 自动驾驶仪系统
Beaver 中包含的 KAP 140 自动驾驶仪系统是一种基于速率的数字自动驾驶仪系统,可提供平稳的性能和仅在更昂贵的自动驾驶仪中发现的增强功能。该系统是霍尼韦尔开发的首款此类系统,将数字技术和可靠性带入轻型飞机驾驶舱。KAP 140 滚转轴功能包括机翼调平器、航向选择和 VOR/LOC 拦截和跟踪。KAP 140 还可以耦合到 GPS 和 RNAV 接收器。滚转速率信息来自转弯协调器。俯仰轴功能包括垂直速度、下滑道和高度保持以及高度预选选项。俯仰信息来自压力传感器和加速度计。KAP 140 自动驾驶系统独立于飞机的人工地平线运行。因此,如果真空系统发生故障,自动驾驶仪将保留侧倾稳定性和所有垂直模式。Beaver 版本中的 KAP 140 功能
日本平流层平台 (SPF) 和 SkyNet
日本的平流层平台 (SPF) 和 SkyNet Peter Lobner,2022 年 3 月 8 日更新 1. 简介 日本平流层平台 (SPF) 计划的可行性研究于 1998 年开始,历时 18 个月,由国家航空实验室 (NAL) 领导。SPF 计划的目标是开发一个基于大型无人驾驶太阳能平流层飞艇的系统,该系统可以在约 20 公里(12.4 英里,65,600 英尺)的高度保持地球静止位置,并执行长期任务,通过 SkyNet 电信基础设施提供各种电信和地球观测服务。自 2000 年以来,SPF 计划一直得到由总理办公室推动的千年项目的资金支持。 2003 年,日本宇宙航空研究开发机构 (JAXA) 由三个组织合并而成:NAL、宇宙航空科学研究所 (ISAS) 和日本国家宇宙开发机构 (NASDA)。NAL 组织在 JAXA 下重组,保留了其对 SPF 的领导作用,SPF 已发展成为一个分为三个阶段、为期八年的计划:
KNKT.21.01.01.04-Final-Report.pdf
°C:摄氏度 A/P:自动驾驶仪 A/T:自动油门 A/T SPD:自动油门速度 A/TC:自动油门计算机 AAIB:航空事故调查科 AAM:自动驾驶仪执行器监视器 ACL:授权、条件和限制 AD:适航指令 ADC:大气数据计算机 ADI:姿态指引指示器 ADS-B:广播式自动相关监视 飞机:一种动力驱动的重于空气的飞机,其飞行中的升力主要来自于在给定的飞行条件下保持固定的表面上的空气动力反应。AFCS:自动飞行控制系统 AFDS:自动驾驶飞行指引系统 AFML:飞机飞行维护日志 AFS:自动飞行系统 AIP:航空信息出版物 飞机:任何能够从空气对地球表面的反作用以外的空气反作用中获得大气支撑的机器 ALARP:尽可能低 ALERFA:用于指定警戒阶段的代码词 ALoS:可接受的安全等级 ALT ACQ:获得的高度 ALT HOLD:高度保持 AML:飞机维护日志 AMM:飞机维护手册 AMO:核准维护组织 AMP:飞机维护程序 AMPM:飞机维护程序手册 AOA:攻角 AOC:航空运营商证书 AOG:地面飞机 APM:飞机程序手册

Ministab 系统描述
德克萨斯州大草原市,以自动飞行控制系统 (AFCS) 的形式为 TH-57 提供基本的 IMC 飞行能力。MINISTAB 系统设计为三轴透明飞行控制系统。在俯仰和滚转轴上,它提供速率阻尼、姿态保持,并结合了力配平功能。偏航增强提供速率阻尼和相对航向保持。系统的俯仰和滚转增强基本上独立于偏航增强运行。此外,在巡航飞行方案中,系统还提供高度保持功能。MINISTAB 设计为透明的 AFCS,这意味着系统的控制输入对操作员来说是看不见的,操作员可以随时用驾驶舱飞行控制输入覆盖 AFCS。这些类型的 AFCS 输入,其中 AFCS 在后台进行飞行控制输入而操作员不知情,被称为“内环”。换句话说,操作员在飞行时不必主动考虑使用 AFCS 系统。由于飞行控制系统采用液压增压设计,力配平旨在为操作员提供人工感觉。AFCS 系统使用与飞行控制液压增压伺服器一起安装的串联执行器。因此,MINISTAB 输入到飞行控制系统中的方式是“内环”方式,即操作员无法在周期性、集体或偏航踏板中检测到 MINISTAB 输入。附件 (1) 中给出了 MINISTAB 操作的流程图。该系统由 3 台计算机(每个控制轴一台)、3 个配平阻尼单元 (TDU)、一台空气数据计算机、3 个执行器、执行器位置指示器、MINISTAB 控制器、接线盒、周期式握把配平开关和踏板配平微动开关组成。MINISTAB 控制器 安装在飞行员之间的中央控制台上的控制面板(图 2)旨在