XiaoMi-AI文件搜索系统
World File Search System高程

从大规模雷达数据中高效提取排水网络...
摘要。现代遥感技术获取的全球和区域高程数据集的可用性为显著提高河流测绘的准确性提供了机会,尤其是在偏远、难以到达的地区。从数字高程模型 (DEM) 中提取河流基于流量累积计算,这是一个汇总参数,当应用于遥感技术生成的大型、嘈杂的 DEM 时,会带来性能和准确性挑战。对 DEM 洼地的稳健处理对于从此类数据中可靠地提取连接的排水网络至关重要。在 GRASS GIS 中作为模块 r.watershed 实现的最低成本流量路由方法经过重新设计,以显著提高其速度、功能和内存要求,并使其成为从大型 DEM 进行河流测绘和流域分析的有效工具。为了评估其对大型洼地(典型的遥感 DEM)的处理能力,我们比较了三种不同的方法:传统洼地填充法、影响减少法和最小成本路径搜索法。比较使用航天飞机雷达地形任务 (SRTM) 和干涉合成孔径雷达高程 (IFSARE) 数据集进行,这些数据集分别覆盖巴拿马中部,分辨率为 90 米和 10 米。精度评估基于 GPS 获取的地面控制点和从选定巴拿马河流沿岸的 Landsat 影像数字化的参考点。结果表明,最小成本路径方法的新实现比原始版本快得多,可以处理大量数据集,并根据参考点验证的河流位置提供最准确的结果。

太空技术在海啸预警系统中的应用
关键基础设施、沿海地区道路网络、其他易受海啸影响的基础设施以及海啸地区的工业、商业、旅游、教育、卫生、住房、金融、宗教和文化设施的位置;识别潜在的疏散路线和安全区域;中等分辨率数字高程模型

HEC-RAS 2D 流动面积灵活计算网格
• . • 距离(这是从桥面上游侧到桥梁外侧上游和下游外侧横截面的距离) • 沿流动方向的桥面宽度 • 过道路流量的堰系数 • 站(沿桥面/道路从左到右的距离)、桥面上游侧和下游侧的高弦和低弦高程

无人机测绘的潜力
无人机测绘的潜力 HENRI EISENBEISS,苏黎世 摘要 无人机 (UAV) 可用于近距离测绘,结合航空和地面摄影测量,可作为小比例区域航空测绘技术的替代方案。目前,低成本无人机主要用于低预算的测绘项目。然而,在过去几年中,低成本无人机达到了一定的实用可靠性和专业水平,使得这些系统可以用作测绘平台。基于无人机的测绘不仅提供了地籍法律和政策所要求的精度以及在砾石坑等小比例区域生成高程模型的要求,而且无人机在经济方面也比其他测量技术具有竞争力。下面将概述各种无人机并介绍它们在测绘任务中的分类。此外,还将解释摄影测量无人机飞行计划、图像采集、质量控制和数据处理的通用工作流程。作为工作流程的补充,我们将介绍两个应用程序,重点关注无人机在地籍应用中的实用性以及小规模区域高程模型的生成。
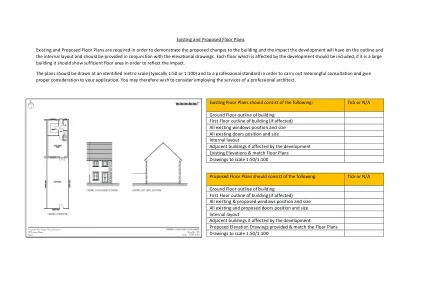
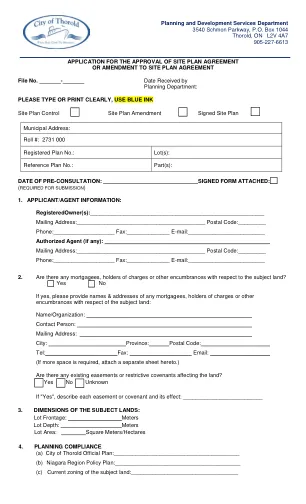
网站计划申请表
a)基于安大略省土地测量师的实际调查的五(5)份副本,除非在召开前会议上另外确定。b)所有支持研究和信息的五(5)份(即运输影响研究,考古评估)在召开会议上确定。c)五(5)个景观计划的副本,该计划具有由景观设计师准备的景观时间表。d)由专业建筑师准备的五(5)份建筑高程副本。(可能需要显示内部布局的平面图)。e)专业工程师准备的五(5)份现场维修计划的副本。f)一(1)11 x 17彩色场地计划的副本,美化环境和高程建筑渲染。g)详细图纸显示标牌,垃圾箱,围栏细节和机械设备的筛选,必须在所有场地计划和/或景观计划中显示。h)以可重复格式提交的每个图纸的一(1)副本(例如11 x 17)i)一(1)与开发相关的所有成本估算的副本(包括所有现场和现场工作)
开发服务排水和铺路工程提交指南和计划审查清单
• 显示并标注现有的等高线(带有高程标签),以一到两英尺的等高线为基准,参考海平面基准。• 显示并标注现有的车道入口、临街人行道和无障碍坡道、街道和现场路面材料(例如混凝土、沥青、铺路石、碎石等)、街道路面和通行权宽度、路内停车、街道路缘线、护栏沟、现场建筑、车辆流通车道、私人车道、消防车道、停车区、景观区、围栏、挡土墙以及所有公共和私人雨水/水/废水/其他公用设施基础设施。• 显示、标注和标注所有现有的地役权。• 显示并标注位于通行权内的所有现有标志、公用设施、信号杆、停车收费表、自行车架、报刊亭、广告亭、DART 长椅/庇护所等。• 显示并标注所有溪流、小溪、排水道和百年一遇的洪泛区。除了 FEMA 覆盖外,还显示和标记实际的 100 年水面高程。

空中线扫描相机 GFXJ 的几何校准
摘要 高分相机(GFXJ)是我国第一款自主研发的机载三线阵CCD相机,设计飞行高度2000m时,对地面三维点的GSD为8cm、平面精度为0.5m、高程精度为0.28m,满足我国1:1000比例尺测绘要求。但GFXJ原有的直接定位精度在平面方向约为4m,高程方向约为6m。为满足地面三维点精度要求,提高GFXJ直接定位精度,本文对GFXJ几何定标进行了深入研究。本次几何标定主要包括两部分:GNSS杆臂与IMU杆轴失准标定、相机镜头与CCD线畸变标定。首先,简单介绍GFXJ相机的成像特性。然后,建立GFXJ相机的GNSS杆臂与IMU杆轴失准标定模型。接下来,建立基于CCD视角的GFXJ镜头与CCD线畸变分段自标定模型。随后,提出迭代两步标定方案进行几何标定。最后,利用在黑龙江省松山遥感综合场和鹤岗地区获取的多个飞行区段进行实验。通过标定实验,获得了GNSS杆臂和IMU视轴失准的几何标定值。为前向、下视和后向线阵独立生成了可靠的CAM文件。实验表明,提出的GNSS杆臂和IMU视轴失准标定模型和分段自标定模型对GFXJ相机具有良好的适用性和有效性。提出的两步标定方案可以显著提高GFXJ相机的几何定位精度。GFXJ原始直接地理定位精度在平面方向约为4 m,在高程方向约为6 m。平面精度约为0.2 m,高程精度小于0.28 m。此外,本文建立的定标模型及定标方案可为其他机载线阵CCD相机的定标研究提供参考。利用GNSS杠杆臂和IMU视轴失准校准值以及CAM文件,GFXJ相机的定位精度可以在仅使用几个地面控制点进行空中三角测量后满足3D点精度要求和2000 m飞行高度1:1000的测绘精度要求。