XiaoMi-AI文件搜索系统
World File Search System串行总线
先进固态交通控制器 astc 采购...
和子组件位于定制机柜中,该机柜使用纽约州标准 179 控制器和 330 机柜的许多功能。这种方法允许紧凑的尺寸、可扩展的配置和简化的机柜布线。主要变化是使用 NEMA 总线接口单元 (BIU) 和 EIA/TIA-485 串行接口到机柜设备 (TS2-Type 1),而不是传统的 170/179 C1 连接器或 NEMA A、B、C 和 D 线束。这样做的好处是简化了机柜布线,同时仍允许未来的扩展和灵活性。为了满足这种方法,串行协议的输入/输出 (I/O) 功能必须进行自定义映射(配置),以允许与 NEMA 标准中显示的 I/O 配置不同的 I/O 配置。但是,对 BIU 的 I/O 功能的分配方式与 NEMA BIU 的电子接口一致,这样就无需根据承包商的设计更改 BIU 硬件和软件。
火箭发动机中使用的数字总线系统的评估...
光纤通道最初是作为存储区域网络开发的。它通过光纤或电缆作为物理层提供 Gbit/s 范围(从 1 Gbit/s 到 10 Gbit/s)的吞吐量。光纤通道 FC-AE-1553 使用 MIL-1553 作为上层协议,但它有很大不同。该协议非常灵活和复杂 - 有 52 个光纤通道规范定义不同的方面或用途,连接计算机系统、存储和其他外围设备。这些规范可通过美国国家标准协会 (ANSI) 公开获取。协议栈(图 5)类似于 OSI 模型,其中最高级别允许通过光纤通道网络映射另一个协议(上层协议)。 FC-AE-1553 是通过光纤通道映射 MIL-1553 总线协议,其物理层适合在航空电子环境中使用。
CA9617 电平转换 FM+ I2C 总线中继器
⚫ 2 通道、双向转换器,用于混合模式 I 2 C 应用中 SDA 和 SCL ⚫ 兼容 I 2 C 和 SMBus ⚫ 电压电平转换范围为 0.8V 至 5.5V 和 2.2V 至 5.5V ⚫ 端口 A 工作电源电压范围为 0.8V 至 5.5V(正常电平) ⚫ 端口 B 工作电源电压范围为 2.2V 至 5.5V(静态偏移电平) ⚫ 5V 容限 I 2 C 总线和使能引脚 ⚫ 0Hz 至 1000kHz 时钟频率(由于中继器增加的延迟,最大系统工作频率可能低于 1000kHz) ⚫ 以 V CCB 为参考的高电平有效中继器使能输入 ⚫ 漏极开路输入/输出 ⚫ 无锁存操作 ⚫ 支持跨中继器的仲裁和时钟延长 ⚫可适应标准模式、快速模式和快速模式 Plus I 2 C 总线设备、SMBus(标准和高功率模式)、PMBus 和多个主设备 ⚫ 断电高阻抗 I 2 C 总线引脚

MIL-STD-1553 总线接口板 - PSI Solutions, Inc.
MIL-STD-1553 (1553) 是一种数字内部时分命令/响应多路复用数据总线。它是一种军用标准,已成为美国国防部用于武器系统集成的基本工具之一。MIL-STD-1553 描述了连接到数据总线的子系统的通信方法和电气接口要求。自推出以来,MIL-STD-1553 的应用已扩展到飞行控制、推进控制和车辆管理(电气、液压、环境控制等)的系统集成。

PESD1CAN CAN 总线 ESD 保护二极管 - 全部产品
销售条款和条件 — 恩智浦半导体产品的销售须遵守一般商业销售条款和条件(见 http://www.nxp.com/profifile/terms ),包括与保修、知识产权侵权和责任限制相关的条款和条件,除非恩智浦半导体另有书面明确约定。如果本文件中的信息与此类条款和条件存在任何不一致或冲突,则以后者为准。
CA9306 双双向 I2C 总线和 SMBus 电压...
CA9306 器件是带有使能输入的双双向 I 2 C 和 SMBus 电压电平转换器,可在 1.2V 至 3.3VV REF1 和 1.8V 至 5.5VV REF2 的范围内工作。CA9306 器件允许在无需方向引脚的情况下在 1.2V 和 5V 之间进行双向电压转换。开关的低导通电阻 (RON) 允许以最小的传播延迟进行连接。当 EN 为高电平时,转换器开关处于导通状态,SCL1 和 SDA1 I/O 分别连接到 SCL2 和 SDA2 I/O,从而允许端口之间的双向数据流。当 EN 为低电平时,转换器开关处于关闭状态,端口之间存在高阻抗状态。CA9306 器件可用于将 400kHz 总线与 100kHz 总线隔离,方法是控制 EN 引脚在快速模式通信期间断开较慢的总线,并进行电压转换。可用封装:MSOP-8、DFN3x4-8、DFN2x3-8 封装。
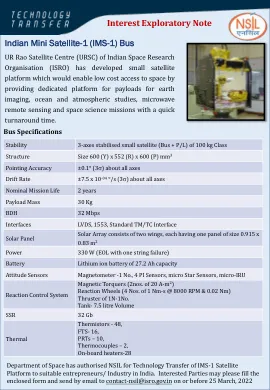
兴趣探索笔记印度微型卫星-1 (IMS-1) 总线
印度空间研究组织 (ISRO) 的 UR Rao 卫星中心 (URSC) 开发了小型卫星平台,该平台通过为地球成像、海洋和大气研究、微波遥感和空间科学任务的有效载荷提供专用平台,实现低成本进入太空,并具有快速的周转时间。
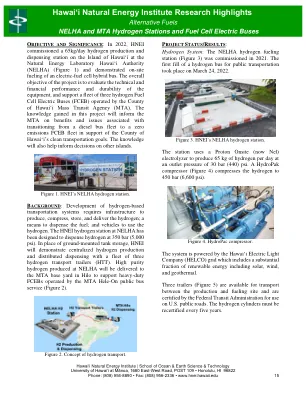
Nelha和MTA氢站以及燃料电池电动总线
o BOXTIVE和S SIMATICANICE:2022年,HNEI在夏威夷岛上委托了65公斤的氢生产和分配站,位于夏威夷天然能源实验室夏威夷管理局(NELHA)(图1)(图1),并证明了电力燃料燃料燃料电池混合加油的现场燃料。该项目的总体目标是评估设备的技术和财务性能和耐用性,并支持由夏威夷县大众运输局(MTA)运营的三氢燃料电池电动巴士(FCEB)的机队。该项目中获得的知识将为MTA提供有关从柴油巴士机队过渡到零排放的福利和问题,以支持夏威夷县的清洁运输目标。知识还将有助于为其他岛屿的决定提供信息。

机器人总线低级控制系统转换为开放...
摘要。本文提出了一种从一个机器人总线(即自主班车到另一个具有不同规格的电子和机械视角规格。在这项工作中,我们执行了一系列实验,以测试自动班车的可靠性和安全性,在将与转向和刹车相关的关键控制系统转移到航天飞机中。为了满足在爱沙尼亚道路上注册自主班车作为合法车辆的要求,我们对班车的低级控制系统进行了几项重要测试。例如,我们手动断开了不同的子系统,以模拟突然无法检查航天飞机是否使用相应的协议起作用(即,当转向控制区域网络失败时,班车应启动制动并切断高速电量功率)。本文证明了在自主航天飞机的不同模型之间转移低级控制系统的可能性,而不会冒着遇到安全/可靠性相关问题的风险。我们的开源解决方案将来有助于对自动班车的实际推广和商业化。