XiaoMi-AI文件搜索系统
World File Search System亚速
亚里亚姆比亚克郡议会对采矿、可再生能源的立场......
我们承认,采矿、可再生能源和输电项目由州政府推动和支持,目的是推进维多利亚州的清洁经济目标。这些举措旨在到 2045 年实现净零排放,到 2035 年实现 95% 的可再生能源。此外,矿砂开采旨在促进能源转型。值得注意的是,作为理事会,我们没有权力掌控转型,也不是矿砂开采和可再生能源项目的审批机构,这些项目引起了社区的担忧。

米亚克4
26 十二月 24 一般前线覆盖 01 26 十二月 24 26 十二月 24 前线覆盖 - 频率更正 01 回收 01 更新记录 02 26 十二月 24 检查清单 01-03 CL 26 十二月 24 26 十二月 24 图例 01 24 十二月 22 图例 02 10 八月 23 图例 03 05 十一月 20 缩写 01 AB 16 七月 20 缩写 02 AB 09 九月 21 缩写 03 AB 07 十二月 17 国际民航组织语音字母表 01 31 十月 24 警告 01 27 四月 17 机场运行最低标准 01 24 三月 22 降级设备 01 27 四月 17 ILS 接地区坐标 01 01 12 月 22 日 SIV 1 01 26 12 月 24 日 26 12 月 24 日 SIV 2 02 26 12 月 24 日 26 12 月 24 日 RWY 真航向 01 01 12 月 22 日 分钟至十进制转换 01 机场

阿丽亚娜 5 号 - 阿丽亚娜空间公司
2.7.3. GTO 双机发射的发射窗口 2.7.4. GTO 单机发射的发射窗口 2.7.5. 非 GTO 发射的发射窗口 2.7.6. 发射推迟 2.7.7. 升空前关闭发动机 2.8. 上升阶段的航天器定位 2.9. 分离条件 2.9.1. 定位性能 2.9.2. 分离模式和指向精度 2.9.2.1. 三轴稳定模式 2.9.2.2. 自旋稳定模式 2.9.3. 分离线速度和碰撞风险规避 2.9.4. 多重分离能力 第 3 章 环境条件 3.1. 一般要求 3.2. 机械环境 3.2.1. 静态加速度 3.2.1.1. 地面 3.2.1.2. 飞行中 3.2.2.稳态角运动 3.2.3. 正弦等效动力学 3.2.4. 随机振动 3.2.5. 声振动 3.2.5.1. 地面 3.2.5.2. 飞行中 3.2.6. 冲击 3.2.7. 整流罩下的静压 3.2.7.1. 地面 3.2.7.2. 飞行中 3.3. 热环境 3.3.1. 简介 3.3.2. 地面操作 3.3.2.1. CSG 设施环境 3.3.2.2. 整流罩或 SYLDA 5 下的热条件 3.3.3. 飞行环境 3.3.3.1. 整流罩抛弃前的热条件 3.3.3.2. 气动热通量和整流罩抛弃后的热条件 3.3.3.3. 其他通量 3.4. 清洁度和污染 3.4.1.环境中的洁净度 3.4.2. 沉积污染 3.4.2.1. 颗粒污染 3.4.2.2. 有机污染 3.5. 电磁环境 3.5.1. L/V 和范围 RF 系统 3.5.2. 电磁场 3.6. 环境验证
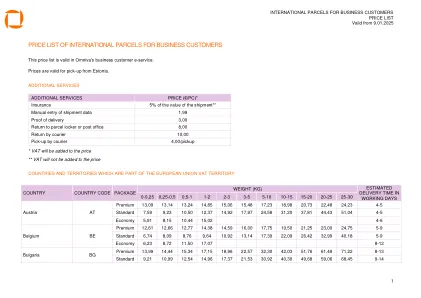
商业客户国际包裹价格表
工作日 0-0,25 0,25-0,5 0,5-1 1-2 2-3 3-5 5-10 10-15 15-20 20-25 25-30 (马德拉群岛、亚速尔群岛) 标准 22,34 24,45 26,64 30,33 36,41 43,13 58,93 74,72 90,52 106,31 122,11 12-21

闪速燃烧法测定金属有机骨架中的 CHNS-O
金属有机骨架 (MOF) 是由金属离子或金属簇与刚性有机配体配位形成的晶体材料,可形成具有极高孔隙率的一维、二维或三维结构。因此,它们是具有巨大潜力的独特晶体结构。利用它们,可以设计具有非常特殊属性的系统。特别是,由孔隙形成的内部表面可以进行调整,以使其适应特定应用,在表面积与体积比之间“发挥作用”。这些详细的工程特性吸引了许多科学家的兴趣,他们正致力于优化它们以用于工业应用:气体储存和分离、传感器、水和土壤净化、生物医学,还有微电子。在此背景下,我们分析了 7 种 MOF,其预期值为 N:~10% - C:~55% - H:~7% - O:~20%(化合物不含硫)。


在协作机器人中用于人类跟踪的凸轮速算法
2Senior Developer电子健康解决方案,Amman,Jordan摘要:本文考虑了在协作机器人工作区域中用于人类跟踪的凸轮移算法的复杂实现。该研究涵盖了凸轮缩影的算法和数学基础,详细介绍了用于提高跟踪准确性的基本原理和数学模型。在Pycharm环境中开发了一个Python程序,以考虑到实时处理和与机器人系统集成等方面,以有效地实施该算法。该研究对跟踪速度进行了全面评估,研究了算法在不同条件下的有效工作以及它如何影响系统的整体灵敏度。结果证明了凸轮班算法在提供准确和及时的跟踪方面的有效性,突出了其对动态和交互式环境的适用性。这项工作有助于通过提高跟踪功能,在共享工作领域获得更好的互动和安全性来优化协作机器人的性能。