机构名称:
¥ 1.0
2Senior Developer电子健康解决方案,Amman,Jordan摘要:本文考虑了在协作机器人工作区域中用于人类跟踪的凸轮移算法的复杂实现。该研究涵盖了凸轮缩影的算法和数学基础,详细介绍了用于提高跟踪准确性的基本原理和数学模型。在Pycharm环境中开发了一个Python程序,以考虑到实时处理和与机器人系统集成等方面,以有效地实施该算法。该研究对跟踪速度进行了全面评估,研究了算法在不同条件下的有效工作以及它如何影响系统的整体灵敏度。结果证明了凸轮班算法在提供准确和及时的跟踪方面的有效性,突出了其对动态和交互式环境的适用性。这项工作有助于通过提高跟踪功能,在共享工作领域获得更好的互动和安全性来优化协作机器人的性能。
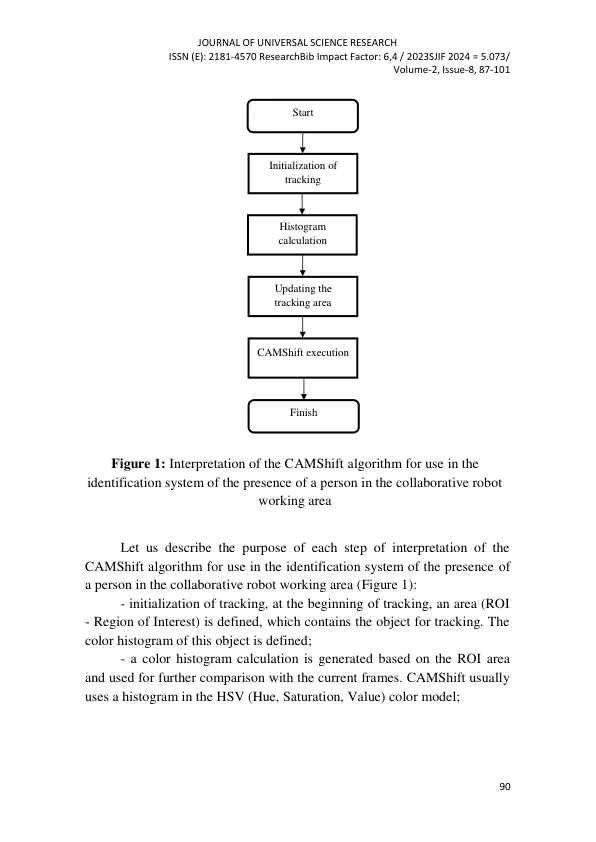
在协作机器人中用于人类跟踪的凸轮速算法
主要关键词


相关文件推荐