XiaoMi-AI文件搜索系统
World File Search System交互方式

人工智能时代的文献
人工智能与机器学习技术的快速发展,对人类生活的各个方面产生了深远影响。学者[17,18]指出,人工智能将通过不断迭代,对创意生产、语言表达等领域产生深远影响。近半年来,大语言模型人工智能在自然语言处理领域取得突破,改变了人与文本内容的交互方式[3]。GPT-4、BERT等国际前沿的大语言模型人工智能已经可以模拟人类独有的复杂语言模式和文学创作特征。经过用户的训练,它们还可以根据需求输出特定内容。随着这类人工智能的快速发展,是时候重新探索和审视它们对以输出文本内容为主要生产方式的文学创作及相关产业的影响了。可以预见,随着技术迭代速度不断加快,越来越多依赖文字的文学创作和职业将受到一定影响。尤其在当前时代,普遍的技术封锁无法锁住文本内容创作的动力。在这样的世界大势之下,任何扰乱写作形式和方法的变量,都将带动全球文学及文学相关领域的变革。

威胁和错误管理 (TEM) 模型 - SmartCockpit
威胁与错误管理 (TEM) 为实际风险管理提供了一种直观而灵活的方法。它最初是由美国德克萨斯大学的人为因素研究人员开发的。威胁与错误管理 (TEM) 模型是一个概念框架,有助于从运营角度理解动态和具有挑战性的运营环境中安全与人为因素之间的相互关系。TEM 不是一个革命性的概念,但它是逐渐发展起来的,是不断努力通过实际整合人为因素知识来提高航空运营安全裕度的结果。法国蓝航空受到全球航空公司的欢迎,并被公认为国际最佳实践,从第一天起,它就将 TEM 政策融入其 SOP 中。威胁与错误管理是我们当前 CRM 实践的核心。这在一定程度上是因为它涵盖了该学科的所有其他领域。法国蓝航空已将 TEM 纳入 FCOM 中描述的每个飞行阶段的介绍以及每次起飞/进近简报中。它应该以交互方式、凭借智慧和常识来使用,而不是通过强制性的个人鹦鹉学舌式投影来解决。

在线文章 动态系统的多目标模型独立自适应跟踪机制
摘要:在机器人文献中,最佳跟踪问题通过使用各种鲁棒和自适应控制方法来解决。然而,这些方案与实施限制有关,例如在具有完整或部分基于模型的控制结构的不确定动态环境中的适用性、离散时间环境中的复杂性和完整性以及复杂耦合动态系统中的可扩展性。开发了一种在线自适应学习机制来解决上述限制,并为跟踪控制类问题提供通用解决方案平台。该方案使用同时线性反馈控制策略最小化跟踪误差并优化整体动态行为。采用基于值迭代过程的强化学习方法来求解底层贝尔曼最优方程。生成的控制策略以交互方式实时更新,而无需任何有关底层系统动态的信息。采用自适应评论家的方法来实时近似最佳求解值函数和相关控制策略。在模拟中说明了所提出的自适应跟踪机制在不确定的气动学习环境下控制柔性翼飞机的作用。

图形开发中的机器学习和AI
摘要。软件计算机图形和开发技术的融合彻底改变了数字景观,开辟了视觉讲故事的新边界,互动体验和数字创新。本文探讨了最新的进步,技术和趋势,这些进步塑造了计算机生成的图像,动画,虚拟现实和开发工具的动态领域。从诸如射线追踪和全球照明之类的先进渲染技术到虚拟和增强现实的身临其境的世界,软件计算机图形正在改变我们对数字内容的感知和交互方式。开发技术,例如游戏引擎,图形API和Shade编程,使创建者能够在广泛的平台上制作视觉上令人惊叹和互动的体验。抽象探讨了动画工具的复杂性,虚拟现实设计原理以及在图形开发中的机器学习和AI的集成。通过研究艺术,技术和创新之间的协同作用,这项研究阐明了软件计算机图形技术在创建引人入胜的叙述,动态视觉内容和交互式数字环境方面的变革潜力。

使用 3-d 加速度计进行手势识别 - SMEC
摘要:基于手势的交互是一种自然的人机交互方式,在普适计算环境中有着广泛的应用。本文提出了一种基于加速度的手势识别方法,称为 FDSVM(基于帧的描述符和多类 SVM),该方法仅需要可穿戴的三维加速度计。使用 FDSVM,首先收集手势的加速度数据并用基于帧的描述符表示,以提取判别信息。然后构建基于 SVM 的多类手势分类器以在非线性手势特征空间中进行识别。在包含数周内 12 个手势的 3360 个手势样本的数据集上进行的大量实验结果表明,所提出的 FDSVM 方法明显优于其他四种方法:朴素贝叶斯、DTW、HMM 和 C4.5。在用户相关的情况下,FDSVM 对 4 个方向手势的识别率为 99.38%,对所有 12 个手势的识别率为 95.21%。在用户无关的情况下,它对 4 个手势的识别率为 98.93%,对 12 个手势的识别率为 89.29%。与文献中报道的其他基于加速度计的手势识别方法相比,FDSVM 在用户相关和用户无关的情况下均能给出最佳结果。
基于机械能量消耗的舒适度评估...
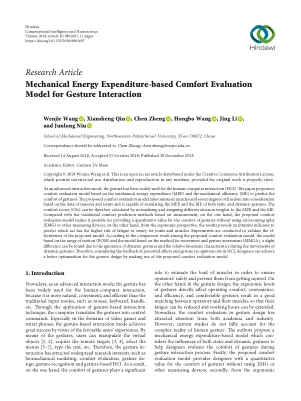
手势作为一种先进的交互方式,在人机交互中得到了广泛的应用。本文提出了一种基于机械能量消耗(MEE)和机械效率(ME)的舒适度评价模型来预测手势的舒适度。该舒适度评价模型基于肌肉和关节的数据,考虑了19块肌肉和7个自由度,能够模拟静态和动态手势的MEE和ME。因此,可以通过对MEE和ME进行归一化并赋予不同的决策权重来计算舒适度分数(CS)。与传统的基于测量的舒适度预测方法相比,一方面,该舒适度评价模型可以在不使用肌电图(EMG)或其他测量设备的情况下为手势的舒适度提供量化值;另一方面,从人机工程学的角度来看,结果提供了一个直观的指标来预测哪种动作对关节和肌肉来说更具有疲劳或损伤的风险。通过实验验证了所提模型的有效性。将本文提出的舒适度评价模型与基于运动范围(ROM)的模型以及基于运动和手势评估方法(MMGA)的模型进行比较,发现由于忽略了运动过程中的动态手势和相对运动学特性,模型的预测结果略有不同。

具有主动偏好学习的多目标贝叶斯优化
有很多现实世界的黑框优化概率需要同时优化多个标准。然而,在多目标优化(MOO)问题中,确定整个帕累托阵线需要过度的搜索成本,而在许多实际情况下,决策者(DM)只需要在帕累托最佳解决方案集中的特定解决方案。我们提出了一种贝叶斯操作方法(BO)方法,以使用昂贵的目标功能识别MOO中最喜欢的解决方案,其中DM的贝叶斯偏好模型是根据两种称为成对偏好和改进请求的Supperions类型的交互方式自适应估算的。要探索最优选的解决方案,我们定义了一个采集函数,在该函数中,在观察函数和DM偏好中的不确定性都已合并。为了最大程度地减少与DM的相互作用成本,我们还为偏好估计提出了一种主动学习策略。我们通过基准功能优化和机器学习模型的高参数优化问题来证明我们提出的方法的有效性。

信息丰富的虚拟环境中基于多层多任务标记的交互
简单而廉价的交互在任何虚拟环境 (VE) 的操作和探索中都起着关键作用。在本文中,我们提出了一种交互技术,该技术以简单且计算成本低廉的方式为复杂对象提供两种不同的交互方式(信息和控制)。交互基于以专门的方式使用多个嵌入式标记。所提出的标记就像一个交互外围设备,其工作原理就像一个触摸支付,可以在 3D VE 中执行任何类型的交互。所提出的标记不仅用于与增强现实 (AR) 交互,还用于与混合现实交互。开发了一个生物虚拟学习应用程序,用于评估和实验。我们分两个阶段进行了实验。首先,我们将一个简单的 VE 与所提出的分层 VE 进行了比较。其次,对所提出的标记、一个简单的分层标记和多个单个标记进行了比较研究。我们发现所提出的标记具有更好的学习效果、交互的简易性以及相对较少的任务执行时间。与简单的 VE 相比,结果显示分层 VE 的学习效果有所改善。
使用 3-d 加速度计进行手势识别 - SMEC
摘要:基于手势的交互是一种自然的人机交互方式,在普适计算环境中有着广泛的应用。本文提出了一种基于加速度的手势识别方法,称为 FDSVM(基于帧的描述符和多类 SVM),该方法仅需要可穿戴的三维加速度计。使用 FDSVM,首先收集手势的加速度数据并用基于帧的描述符表示,以提取判别信息。然后构建基于 SVM 的多类手势分类器以在非线性手势特征空间中进行识别。在包含数周内 12 个手势的 3360 个手势样本的数据集上进行的大量实验结果表明,所提出的 FDSVM 方法明显优于其他四种方法:朴素贝叶斯、DTW、HMM 和 C4.5。在用户相关的情况下,FDSVM 对 4 个方向手势的识别率为 99.38%,对所有 12 个手势的识别率为 95.21%。在用户无关的情况下,它对 4 个手势的识别率为 98.93%,对 12 个手势的识别率为 89.29%。与文献中报道的其他基于加速度计的手势识别方法相比,FDSVM 在用户相关和用户无关的情况下均能给出最佳结果。
使用 3-d 加速度计进行手势识别 - SMEC
摘要:基于手势的交互是一种自然的人机交互方式,在普适计算环境中有着广泛的应用。本文提出了一种基于加速度的手势识别方法,称为 FDSVM(基于帧的描述符和多类 SVM),该方法仅需要可穿戴的三维加速度计。使用 FDSVM,首先收集手势的加速度数据并用基于帧的描述符表示,以提取判别信息。然后构建基于 SVM 的多类手势分类器以在非线性手势特征空间中进行识别。在包含数周内 12 个手势的 3360 个手势样本的数据集上进行的大量实验结果表明,所提出的 FDSVM 方法明显优于其他四种方法:朴素贝叶斯、DTW、HMM 和 C4.5。在用户相关的情况下,FDSVM 对 4 个方向手势的识别率为 99.38%,对所有 12 个手势的识别率为 95.21%。在用户无关的情况下,它对 4 个手势的识别率为 98.93%,对 12 个手势的识别率为 89.29%。与文献中报道的其他基于加速度计的手势识别方法相比,FDSVM 在用户相关和用户无关的情况下均能给出最佳结果。