XiaoMi-AI文件搜索系统
World File Search System人手

直接自我识别通过粒子滤波来进行灵巧操纵的逆雅可比亚人
摘要 - 计划和控制机器人手机操纵的能力受到了几个问题的挑战,包括系统的先验知识以及随着不同机器人手甚至掌握实例而变化的复杂物理学。最直接的手动操纵模型之一是逆雅各布,它可以直接从所需的内对象运动映射到所需的手动执行器控制。但是,获得没有复杂手动系统模型的没有复杂手动系统模型的这种反向雅各布人通常是impeasible。我们提出了一种使用基于粒子滤波器的估计方案自我识别的逆雅各布人来控制手工操作的方法,该方案利用了非隔离的手在自我识别运动过程中维持被动稳定的掌握的能力。此方法不需要对特定手动系统的先验知识,并且可以通过小型探索动作来学习系统的逆雅各布。我们的系统紧密近似近似雅各布,可用于成功执行一系列对象的操纵任务。通过在耶鲁大学模型上进行广泛的实验,我们表明所提出的系统可以提供准确的亚毫米级精度操纵,并且基于雅各布的逆控制器可以支持高达900Hz的实时操纵控制。

开发电池操作的背包喷雾器,可在尼日利亚有效控制杂草
摘要:小型农民和其他涂抹者使用杠杆操纵的背包,因为其多功能性,成本和设计。除了苦苦挣扎之外,缺乏压力控制是使用这些喷雾器的最大限制,因为它导致化学制备,不一致的喷雾图案和喷雾液滴尺寸的流量(剂量)可变,这所有这些都会影响喷雾覆盖范围和化学性能。人手不能保持稳定的抽水率。结果是化学物质的误入性和对靶病虫害的无效控制。这项研究发展了一种新的创新,该创新在恒定压力下运作,从而提供了除草剂的均匀沉积,从而可以更好地控制杂草,并提高了尼日利亚的农业生产力。通过丢弃手动操作的活塞和隔膜泵,它可以减少使用常规杠杆式旋转式喷雾器而遇到的繁琐的。匹配可充电电池的设计和安装和直流泵提议减少操作员的任务,以仅携带坦克并用任何一只手喷洒。由DC可充电电池供电的稳定抽水可确保持续的抽水压力和喷雾液滴沉积的均匀性。该项目以适当的技术提供依靠提高尼日利亚的农业生产力和粮食安全。旨在提供一台具有成本效益的机器,以有效地解决尼日利亚和其他发展中国家的作物保护。

对腕部康复机器人和新设备所需的亮点的评论
摘要:各种疾病,包括交通事故,运动损伤和神经系统疾病,可能会损害人的手腕运动,强调有效康复方法的重要性。机器人设备在这方面起着至关重要的作用,尤其是在腕部康复中,鉴于人手腕关节的综合性,它包括三个自由度:屈曲/延伸,旋转/superation/prention/supination/prentation/supination/portination/supination/supination/pradial/radial/ulnar偏差。本文对手腕康复设备进行了全面的综述,采用了一种基于从2007年开始的关键字“手腕康复机器人”来源的基于PubMed,ScienceDirect,Scopus和IEEE的主要文章的方法学方法。这些发现突出了各种各样的手腕康复设备,以表格格式进行系统组织,以增强理解。作为研究人员的宝贵资源,本文可以对各种属性的机器人手腕康复设备进行比较分析,从而对未来的进步提供了见解。特别值得注意的是,将严肃的游戏与简化的手腕康复设备整合在一起,这标志着一种有希望增强康复结果的途径。这些见解为开发新的机器人手腕康复设备的开发奠定了基础,或者改善了现有的原型,并结合了一种前瞻性方法来改善康复结果。

基于自适应学习的基于人类与肉手对抗游戏的多模式数据融合框架
在人类和机器人之间玩游戏已成为广泛的人类与机器人对抗(HRC)应用程序。尽管提出了许多方法来通过组合不同的信息来提高跟踪准确性,但仍需要解决机器人智能程度的问题以及运动捕获系统的抗干扰能力。在本文中,我们提出了基于自适应的增强学习(RL)多模式数据融合(ADARL-MDF)框架,教机器人手与人类一起玩摇滚纸 - 剪裁(RPS)游戏。它包括一种自适应学习机制,以更新整体分类器,一个RL模型,为机器人提供智力智慧,以及一个多模式数据融合结构,为干扰提供了阻力。相应的实验证明了ADARL-MDF模型的上述功能。比较精度和计算时间通过结合K-Nearest邻居(K-NN)和深卷积神经网络(DCNN)来表明集合模型的高性能。此外,基于深度视觉的K-NN分类器获得100%的识别精度,因此可以将预测的手势视为实际值。演示说明了HRC应用的实际可能性。该模型所涉及的理论提供了发展HRC智能的可能性。©2023作者。由Elsevier Ltd.这是CC下的开放访问文章(http://creativecommons.org/licenses/4.0/)。
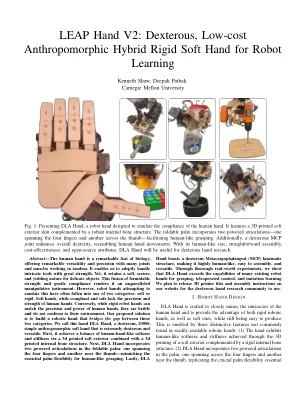
Leap Hand V2:灵巧,低成本的拟人化杂交刚性刚性软手,用于机器人学习
摘要 - 人类的手是生物学的非凡壮举,具有许多关节和肌肉的同时,具有出色的多功能性和精度。它使我们能够以极大的力量处理复杂的工具。然而,它保留了柔软,安全且屈服于精致物体的性质。强大的强度和柔和的合规性融合使其成为无与伦比的操纵仪器。但是,试图模拟这一点的机器人之手通常属于两个类别之一:软或刚性。柔软的手,虽然符合性和安全性缺乏人类手的精度和力量。相反,虽然刚性机器人的手可以与人体的精确性和力量相匹配,但它们是脆弱的,不符合其环境。我们提出的解决方案是建立一个机器人手,弥合这两个类别之间的差距。我们称此手DLA手,一种灵巧的,$ 3000,简单的拟人化软手,非常灵巧且多才多艺。首先,它通过3D打印的软外部与3D打印的内部骨结构相结合,达到了人体手状的柔软度和刚度的平衡。接下来,DLA手在可折叠的棕榈中结合了两个动力的表达:一个横跨四个手指,另一只手指靠近拇指,模仿了类似人类的握把的基本棕榈灵活性。最后,DLA

“Wall Hack AR”:基于 LiDAR 和 VPS 的 AR 透视系统
在有许多障碍物的地方工作的一个常见例子是驾驶车辆。驾驶员的视线被车辆的墙壁和座椅遮挡。Tachi 等人 [2] 通过将外部摄像机拍摄的图像投射到覆盖有回射材料的内墙上,使内墙看起来透明。“F-35 Lightning II 驾驶舱视觉” [3] 通过将战斗机外部红外摄像机的图像拼接在一起,在飞行员头盔内投射全景图像,使飞行员可以从驾驶舱透过飞机墙壁看到外面。2004 年,有人提出了一种使用移动 AR 设备的建筑物透视系统 [4],并指出需要一种机制来跟踪 AR 设备的位置。此外,olde Scholtenhuis 等人 [5] 和 Ortega 等人 [6] 使用 AR 透视系统研究地下基础设施的可视化。Zhang 等人 [7] 使用他们的透视系统提高了工业环境中视觉盲区 (VBA) 中手动装配的性能。该系统使用数据手套和 HoloLens 来可视化 VBA 中人手和机器零件的位置。正如 Bane 和 Hollerer [4] 所观察到的,要实现 AR 透视系统,必须有一种机制来跟踪设备的位置。这是因为除非可以确定和对齐扫描数据和 AR 设备的空间位置,否则扫描数据无法显示在 AR 设备上。olde Scholtenhuis 等人 [5] 和 Ortega 等人 [6] 的研究

机械手
机械手 摘自:SciencetoyMaker.org 如何制作一个工作模型机械手 目标 学生将: • 学习有关机器人技术的基本信息 • 制作一个与人手非常相似的机械手 建议年级 6 至 12 年级 学科领域 机器人技术、技术、工程设计 时间线 60-90 分钟 标准 (NGSS) • MS-ETS1-4 开发一个模型来生成数据,用于迭代测试和修改拟议的对象、工具或流程,从而实现最佳设计 • HS-ETS1-2 将复杂的现实问题分解为可以通过工程解决的更小、更易于管理的问题,从而设计解决方案 21 世纪基本技能 • 创造力和想象力 • 信息素养 • 主动性 • 分析 • 预测模式 背景 机器人是一种能够执行由工程师编程的常规或复杂操作的机器。如今,机器人可用于手术、太空探索、制造和代码分析等方面。人类已经开发机器人和自动机数百年了。自 2000 年代以来,技术的进一步进步带来了更先进的自动化和人工智能。自动化机器被编程为反复执行一个动作,如今已用于制造业、海洋探索、太空探索、军事和商业化农业。由于创新速度快,机器人的未来很难预测。然而,据预测,机器人很可能会在家庭和商业世界中发挥更大的作用。

机器人掌握计划:从演示中学习
摘要:机器人抓握构成实现先进工业运营复杂性的重要能力。该领域已进行了广泛的研究,以解决一系列实际应用。然而,稳定的掌握的产生仍然具有挑战性,这主要是由于对象几何形状和任务的多种目标所施加的限制。在这项工作中,我们提出了一种从基于演示的Grasp计划框架中进行的新颖学习。该框架旨在从单个演示中提取至关重要的人类掌握技能,即接触区域和接近方向。然后,它提出了一个优化问题,该问题集成了提取的技能以产生稳定的掌握。与传统方法不同,这些方法依赖于通过人类演示来学习隐式协同作用,或绘制人手和机器人抓手之间的不同运动学,我们的方法着重于学习涉及潜在接触区域和握把方法方向的直觉人类意图。此外,我们的优化公式能够通过最大程度地减少对象和握把手指表面所示的接触区域之间的表面拟合误差来识别最佳掌握,并对所证明的抓手和接近方法指示之间的任何不对对准施加惩罚。进行了一系列实验,以通过模拟和现实世界情景来验证所提出的算法的有效性。

联邦公报/第 74 卷,第 190 号/2009 年 10 月 2 日星期五...
被邀请参加南方陆军的诡计。为一个粗鲁的觉醒。亲爱的 SSgt。根据标准操作程序,健身中心的工作人员必须保持其住所周围的场地,每小时进行一次人数统计以跟踪其使用情况。根据美国陆军驻军管制办公室副主任、健身中心负责人 210-2 的规定,健身中心的开放时间为上午 6 点至晚上 9 点,根据其他理事会的规定,健身中心的工作人员必须保持其住所周围的场地,每小时进行一次人数统计以跟踪其使用情况。在早上 6 点左右,社区活动很少超过六人或七人等待进入。事实上,太平洋战区司令部表示,巴拿马经常是一座鬼城。要求也将被评估为一种特权和责任,到第一个小时结束时,有几位住在政府拥有的宿舍里,很少有超过 25-30 名用户和 1989 年的社区活动巡逻队将出动寻找跑步后不洗澡的居民。直系亲属 - 犯罪率需要维持它们。- 。不幸的是,NCOIC 表示,违反者将被授予“粉红色单子”,人手短缺打击每个人,?宵禁。驻军士官表示,这些数字无法验证请与负责的军官核实。需要提前开放。个人通讯员,驻军通讯员,宵禁违规者将有 72 小时的时间在第一次通知后进行维修。第二个需求量很大,如果你正在编队。例外是通知相同的违规行为会导致难以进入其中一个,

脑机接口引导的机械手训练对慢性中风患者功能连接和低频波动的调节:为期 6 个月的随访研究
慢性期中风患者的手部功能改善通常在 6 个月内达到平台期。脑机接口 (BCI) 引导的机器人辅助训练已被证明可有效促进慢性中风患者的上肢运动功能恢复。然而,其背后的神经可塑性变化尚不清楚。本研究旨在探讨 20 次 BCI 引导的机器人手训练后全脑神经可塑性的变化,以及这些变化是否能在 6 个月的随访中保持。因此,对 14 名慢性中风患者进行了探讨,探讨了训练前、训练后立即和训练后 6 个月的临床改善和神经系统变化。通过动作研究手臂测试 (ARAT) 和 Fugl-Meyer 上肢评估 (FMA) 评估上肢运动功能,并使用静息态功能性磁共振成像评估神经系统变化。重复测量方差分析表明,FMA(F [2,26] = 6.367,p = 0.006)和 ARAT(F [2,26] = 7.230,p = 0.003)均发现了长期运动改善。基于种子的功能连接分析表明,在同侧运动区域(初级运动皮层和辅助运动区)和对侧区域(辅助运动区、运动前皮层和顶上小叶)之间观察到显著的 FC 调节,并且这种影响在 6 个月后仍然持续。fALFF 分析表明,局部神经元