XiaoMi-AI文件搜索系统
World File Search System人手
公共卫生工作人员管道发展计划
o公共和行为健康部门获得了400万美元的ARPA资金,用于公共卫生管道工作,以解决人员不足,并为当前的劳动力提供了向Upskkill的劳动力的机会。详细信息仍在开发中,但目的是提供财政支持(例如课程,学费或学位报销)DPBH员工攻读额外的培训或学位以通过管道前进,以换取对DPBH工作一段时间的承诺。资金可能会通过RFP流程分配,以解决直到2026年的管道和人手不足的问题。o UNLV公共卫生学院获得了联邦卫生资源和服务管理局的奖学金,授予本科生的奖学金,公共卫生学后毕业证书,公共卫生学后证书,以及研究生助理,以鼓励个人进入公共卫生计划。UNLV SPH正在开始招聘工作,针对工作
[休假2025年,...Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...](/simg/f\f6b05e5f34a4956214b8b37bd3a6ce5e3897696f.webp)
Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...Abelson,HAL [CS,AI+D](Hal@mit.edu)[休假2025年,...
从视觉,触觉和音频等原始感官观察(即感觉运动学习)中学习进行决策的学习;机器人学习的特殊动力;深入的强化学习;深度学习;物体操纵;机器人运动;导航;基于模型的控制;模仿学习;逆增强学习;机器人手的设计;软机器人技术;使用自然语言将常识知识整合到机器学习系统中;自学学习;计算机视觉;多模式表示从视觉,触摸和音频学习;了解人类活动;人类机器人相互作用;机器学习在医疗保健中的应用;人类认知;计算神经科学。总体研究目标是建立允许代理/机器人通过探索和进行实验不断学习世界的机制。一个应用区是家庭中的机器人,但不限于它。

3D力检测的灵活触觉传感器
摘要:随着触觉力的传感在机器触觉领域变得越来越重要,实现多维力传感仍然是一个挑战。我们提出了一个3D柔性传感器,该传感器由轴对称半球突出和四个同等大小的四分流电极组成。通过使用力和电场模型模拟设备,已经发现,当剪切力的幅度保持恒定并且其方向在0 -360°内变化时,可以通过四个电极的电压关系来表达力的大小和方向。实验结果表明,在0 - 90°的范围内可以达到15°的分辨率。此外,我们将传感器安装在机器人手上,使其能够感知触摸和掌握动作的幅度和方向。基于此,设计的3D柔性触觉传感器为多维力检测和应用提供了宝贵的见解。关键字:灵活的触觉传感,单电极模式,力检测,正常和剪切力,机器人手系统

muxhand:使用时间划分的多重电动机
摘要 - 机器人灵巧的手负责抓握和灵巧的操纵。电动机的数量直接影响了此类系统的敏捷性和成本。在本文中,我们提出了Muxhand,这是一种使用时间分割多路复用电动机(TDMM)机制的机器人手。该系统允许仅4电动机独立控制9条电缆,从而显着降低了成本,同时保持高敏度。为了提高抓握和操纵任务期间的稳定性和平滑度,我们将磁接头整合到了三个3D打印的手指中。这些关节具有出色的影响力和自我测量能力。我们进行了一系列实验,以评估Muxhand的抓握和操纵性能。结果表明,TDMM机制可以精确控制连接到手指接头的每个电缆,从而实现强大的抓握和灵活的操作。此外,指尖载荷能力达到1.0 kg,磁接头有效地吸收了冲击和校正未对准而不会损坏。

基于人体运动预测和自适应阻抗控制的轨迹自适应人机物理交互框架
摘要 — 物理人机交互 (pHRI) 在机器人中起着重要作用。为了使人类操作员能够轻松适应与机器人的交互,应实现 pHRI 中的最小交互力。本文提出了一种 pHRI 框架,使机器人能够自适应地调节其轨迹,以最小化交互力和较小的位置跟踪误差。首先通过性能评估指数更新的交互力来调整机器人的轨迹。然后,基于自回归 (AR) 模型预测人手运动以进一步调整轨迹。第三,开发了一种自适应阻抗控制方法,使用表面肌电图 (sEMG) 信号更新机器人阻抗控制器中的刚度,以实现机器人与环境的顺从交互。该方法允许人类操作员通过交互力、手部运动和肌肉收缩与机器人交互。通过研究所提出方法的性能,交互力降低,并实现了良好的位置跟踪精度。对比实验证明了所提出方法的增强性能。

网络安全和数据安全在数字时代的作用...
信息和技术资产的重要性日益增加 公共和私营企业正在积累大量且不断增长的信息资产,因为个人也在越来越多地创建、收集、共享和使用数据。 11 企业和个人越来越依赖信息和技术资产来提供或采购商品、服务和信息。12 企业 13 和个人 14 也正以越来越快的速度将其信息委托给其他企业或个人。无论是在高收入国家还是发展中国家,个人都在拥抱数字技术。15 发展中国家拥有家用电脑的家庭比例从 2005 年的 15.6% 增长到 2019 年的 36.1%,16 而 2005 年至 2020 年间,全球每 100 人手机用户数增长了三倍,中低收入国家增长了四倍。17 此外,2020 年,全球注册的移动货币账户数量增长了 12.7%,达到 12.1 亿个账户,是预测增长率的两倍。18

拟人机械臂假肢的设计与实现
摘要:假肢的开发和制造是医疗技术发展的重要趋势之一。考虑到现代电子技术和自动化系统的发展及其机动性和紧凑性,实际任务是制造一种假肢,其拟人化特性接近功能齐全的人体肢体,并能够高精度地再现其基本动作。本文分析了电子假肢控制系统开发的主要方向。本文介绍了拟人假肢原型及其控制系统的实际实施描述和结果。我们开发了一种拟人化的多指假手,用于机器人研究和教学应用。设计的机械手是其他已知 3D 打印机械手的低成本替代品,具有 21 个自由度——每个手指 4 个自由度,拇指 3 个自由度,2 个自由度负责机械手在空间中的位置。所展示的机械臂的开源机械设计具有接近人手的质量尺寸和运动参数,具有自主电池操作的可能性,能够连接不同的控制系统,例如计算机、脑电图仪、触摸手套。
书籍出版商的类主题名称
书籍的班级名称出版商vii the English(文本)Honey Comb N.C.E.R.T班级-7英语A外星人手N.C.E.R.T班级-8 VII TH ENG -GRAMMAR ENG的ENGER ESTENCES。语法和综合。SULTAN CHAND VII th HINDI BASANT - PART - 2 N.C.E.R.T CLASS - 7 VII th HINDI-GRAMMAR VYAKARAN LATIKA - 7 MADHUBAN VII th MATHS TEXT BOOK FOR CLASS - VII N.C.E.R.T CLASS - 7 VII th SCIENCE TEXT BOOK FOR CLASS - VII N.C.E.R.T CLASS - 7 VII th SCIENCE WX LAB MANUAL科学-7 Saraswati VII TH G.K.新的常识更新创意儿童-Edu Solu。vii The Computer TouchPad计算机系列-7 Orange VII TH S.St.社会和政治生活-II N.C.E.R.T班-7 VII TH S.St.我们的环境(GEO)N.C.E.R.T类-7 VII TH S.St.我们的过去-2 N.C.E.R.T类-7 VII TH Sanskrit Deep Manika Part -2 Saraswati
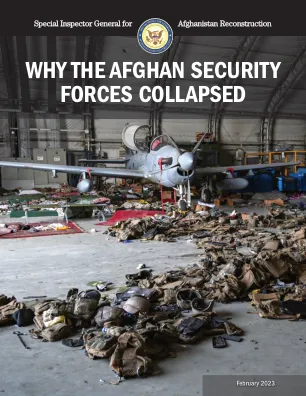
SIGAR 23-16-IP 阿富汗安全部队为何崩溃
其次,ANDSF 仍然依赖美国军方,部分原因是美国将 ANDSF 设计为美国军队的镜像,这需要高度的专业军事知识和领导力。这造成了 ANDSF 的长期依赖。美国还创建了一个士官团,这在阿富汗军事史上毫无根据。ANDSF 的一个关键组成部分是阿富汗空军 (AAF),这是该部队相对于塔利班的最大优势。然而,预计 AAF 至少要到 2030 年才能自给自足。美国于 2021 年 5 月决定从阿富汗撤出现场合同维护,这减少了作战飞机的可用性,并取消了主要地区机场的维护指导。由于 ANDSF 不具备通过地面快速运输美国提供的武器和补给库存以满足作战需求的后勤能力,因此它不得不依靠人手不足的 AAF 来实现这一目标。结果,ANDSF 部队抱怨他们缺乏足够的弹药、食物、水和其他军事装备来维持与塔利班的军事交战。

使用脑机接口控制的概念......
摘要:本研究探讨了为受伤或截肢后的患者实施智能假肢的可能性。脑机技术允许在大脑和外部设备之间获取和发送信号。然而,上肢假肢是一种相当复杂的工具,因为手本身具有非常复杂的结构,由多个关节组成。最复杂的关节无疑是位于拇指根部的鞍状关节。您需要展示足够的解剖学知识来构建一个易于使用且尽可能类似于人手的假肢。使用合适的软件创建合适的控制系统也很重要,以便与脑机接口轻松协同工作。因此,本工作中提出的解决方案由三部分组成,分别是:Emotiv EPOC + Neuroheadsets,由伺服器和 Arduino UNO 板(带专用软件)组成的控制系统,以及在三维图形程序 Blender 中制作并使用 3D 打印机打印的手假肢模型。这种由大脑信号控制的手部假肢可以帮助截肢后的残疾人和残肢部位神经支配受损的人。