机构名称:
¥ 1.0
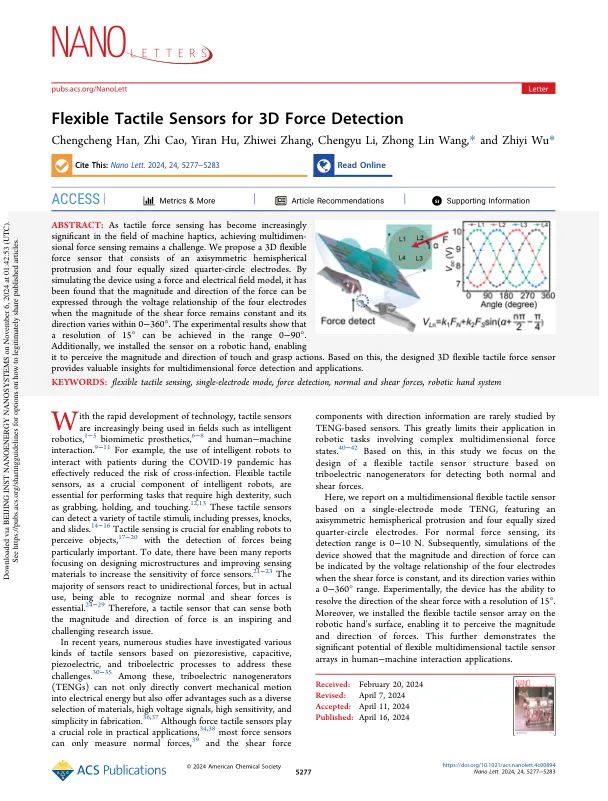
摘要:随着触觉力的传感在机器触觉领域变得越来越重要,实现多维力传感仍然是一个挑战。我们提出了一个3D柔性传感器,该传感器由轴对称半球突出和四个同等大小的四分流电极组成。通过使用力和电场模型模拟设备,已经发现,当剪切力的幅度保持恒定并且其方向在0 -360°内变化时,可以通过四个电极的电压关系来表达力的大小和方向。实验结果表明,在0 - 90°的范围内可以达到15°的分辨率。此外,我们将传感器安装在机器人手上,使其能够感知触摸和掌握动作的幅度和方向。基于此,设计的3D柔性触觉传感器为多维力检测和应用提供了宝贵的见解。关键字:灵活的触觉传感,单电极模式,力检测,正常和剪切力,机器人手系统
3D力检测的灵活触觉传感器
主要关键词



相关文件推荐