XiaoMi-AI文件搜索系统
World File Search System仿真环境
从仿真环境到现实世界情景
本文通过海洋机器人操作提出了一种基于视觉的3D映射的新方法3D映射。所提出的方法介绍了水下机器人任务的三个主要阶段,特别是计划阶段,任务时间和离线处理阶段。最初,我们通过多视频传感器配置和对水下培养基效果的模拟进行任务计划。随后,我们证明了使用泊松表面重建(PSR)(PSR)和枢轴旋转算法(BPA)实时3D表面重建和检测的可能性,从而可以对所获得的数据的获得的数据进行实时质量评估,并允许对现场的覆盖范围进行控制。最后,根据几何可靠性和结果的视觉外观讨论了离线摄影工作流程。在挪威特朗德海姆(Trondheim)峡湾的三个残骸地点的模拟和现实环境中已经开发和测试了所提供的三步方法学框架,并在挪威的峡湾中介绍了新的新型海洋机器人技术,例如明显的机器人Eelume。

SiMAMT:基于策略的多智能体多团队系统的交互式三维图形仿真环境
多智能体多团队环境复杂而繁琐。通常的做法是简化结构,为每个智能体使用单一策略,例如在群集或群体算法中。虽然这种类型的模拟环境可以提供在系统内工作的多个智能体,但它们的交互是单维的,并且它们的群体行为很少。相比之下,SiMAMT 是一种分层的、基于策略的方法,它提供由独立智能单个智能体实现的大规模、复杂的战略计划。这些智能体是独立的,因为它们有自己的天赋、技能、能力和行为,这些都受到上层(例如团队)给它们的命令的影响。这些智能体可以都有自己的行为,或者几个智能体可以有类似的行为,或者整个团队可以共享一种行为,具体取决于场景。此外,SiMAMT 在各个层面都利用基于策略的行为,因此玩家会受到团队策略的影响,团队会受到单位策略的影响,单位会受到营策略的影响,等等。环境需要的任何层次结构(体育、军事、组织等)都可以由 SiMAMT 系统支持。模拟环境提供 3D 可视化环境,可以从整体角度和每个代理的第一人称视角查看模拟的进度。这种组合视图可以深入了解结构层次结构的每一层是如何执行的——代理、团队、整体交互等。此外,它还提供了每个团队正在使用的策略、每个代理的行为以及两者重叠的总体视图。模拟还在模拟运行时提供统计数据,以传递观察、转换、最有可能的策略(SiMAMT 框架提供战略推断来确定环境中其他团队最有可能采用的策略)和整体模拟结果。总体而言,模拟的目标是让多智能体团队在互动时间内发挥战略性,同时进行策略推理以提高其绩效。SiMAMT 模拟实现了这一目标,这将在实验中得到证明。

空中加油中时变惯性飞机的建模和仿真
摘要 本文研究了在综合仿真环境中具有时变质量和惯性特性的受油机的动态建模与仿真应用,该环境包括另外两个重要因素,即具有变长度特性的软管-锥套组件动态模型和加油机尾涡引起的风效应。通过扩展 Lewis 等人推导的固定重量飞机的运动方程,推导出一组新的空中加油受油机运动方程。这些方程包括由于燃油转移和发动机燃油消耗引起的时变质量和惯性特性,并且油箱为矩形而非质点。它们是根据受油机相对于惯性参考系的平移和旋转位置和速度推导出来的。在初始受油机质量条件下,基于一组线性化方程设计了一个线性二次调节器 (LQR) 控制器。在集成仿真环境中实现了带有 LQR 控制器的接收机运动方程,用于在仿真中实现接收机的自主接近和定点保持。� 2016 中国航空学会。由 Elsevier Ltd. 出版。这是一篇根据 CC BY-NC-ND 许可协议开放获取的文章(http://creativecommons.org/licenses/by-nc-nd/4.0/)。


下载中心信息 - 组合产品文档
该软件包包含带有 Accu-ROM TM 的电动助力转向系统仿真环境。该环境可同时仿真电子电路和机械部件。电动助力转向等子系统包含以微秒为单位工作的半导体电子电路以及以毫秒为单位工作的机械部件、齿轮和轴。通常,这种仿真需要较长的仿真时间,因为电子电路和机械部件的时间尺度不同。Accu-ROM 分别计算电子电路和机械部件。它首先验证机械部件,然后简化机械部件模型,最后验证包括电路在内的整个系统。这种方法缩短了整个系统的仿真时间。

独立空域监视的最佳通信拓扑确定和传感器选择
本文提出了一种独立领空监视的传感器选择和网络拓扑确定方法,并使用基于地面的分布式传感,计算和通信网络基础架构,最大结果和最低成本。选择标准包括最小估计错误,最大空域覆盖范围,最小通信时间和功耗,同时保证系统可观察性并为监视观察者提供时间质量信息。开发的算法使用多目标优化策略,考虑到交易之间的交易和及时实施的放松之间的交易。它是利用图理论工具实现的。该方法在桌面仿真环境中使用合成传感器数据在所选区域空域中生成的合成传感器数据。
Kyber-E2E提交CVPR的CARLA自主驾驶挑战 计划以计划为导向的自主驾驶
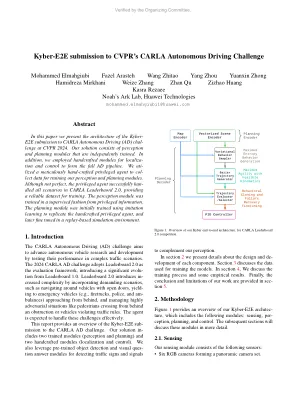
在本文中,我们介绍了Kyber-e2e提交给Carla Automous Driving(AD)Challenge的架构,CVPR2024。我们的解决方案包括经过独立培训的感知和计划模块。此外,我们采用了手工制作的模块来进行本地化和控制,以形成完整的AD管道。我们为精心手工制作的特权代理人提供了培训数据,以培训我们的看法和计划模块。尽管并不完美,但特权代理商成功地将Carla Leaderbaord 2.0中的所有场景成功提供了培训的可靠数据集。感知模块是从特权信息中以有监督的方式培训的。该计划模块最初是使用模仿学习来复制手工制作的特权代理的培训,后来在基于重放的仿真环境中进行了微调。

NTP示范工具和任务概念...
本文提出了一种方法,没有对传感器选择和通信网络拓扑计算的反馈,用于使用最大值结果,使用基于地面的分布式感应,计算和通信网络基础架构,并使用最低结果和最低成本。选择标准包括最大的空域与最少的资源,最少的通信时间和功耗,同时保证系统可观察性并及时为固定用户和移动用户提供高质量的高质量信息。开发的算法使用多目标优化策略,考虑到相互构想的目标之间的交易,并使用o {架子计算工具实施。在桌面仿真环境中使用合成传感器数据在选定的区域空域和概念无线通信网络的参数中生成的合成传感器数据进行了验证。
2025-h2-at-scale-aries-crada-call-...
• 可直接与风力涡轮机、太阳能光伏、锂电池、负载组、可控电网接口、公用电网或虚拟仿真环境(数字实时模拟和网络范围)的任意组合进行交流耦合 • 混合电网控制器控制校园内的所有电力资产,包括电解器和燃料电池发电机的闭环电源点控制,并可根据项目进行定制 • 1.25 MW PEM 电解器和 1 MW PEM 燃料电池发电机 • 电解器功率增益(上升)速率为 ~6%/秒,斜率(下降)速率为 ~15%/秒 • 燃料电池可以跟踪电网以及黑启动/电网形式(接近瞬时 100% 功率响应) • 燃料电池调低至 0%,电解器调低至 20%(包括工厂平衡) • 1 Hz 标准数据采集和控制速率,交流电网可以进行 50 kHz 数据采集
基于模拟作战指挥与FRV-DDPG算法的空战自主机动决策
摘要:随着近年来无人机性能和智能化的提升,提高自主空战能力对无人机尤为重要。针对如何提高无人机自主空战机动决策能力,使其接近人工操控的问题,提出一种基于模拟操作指令与最终奖励值深度确定性策略梯度(FRV-DDPG)算法相结合的自主空战机动决策方法。首先,基于空战过程、无人机运动、导弹运动,建立六自由度(6-DOF)模型。其次设计了一种基于粒子群优化径向基函数(PSO-RBF)的预测方法来模拟敌机的作战指令,使得训练过程更加真实;然后提出一种改进的DDPG策略,将最终的奖励值按一定比例的时间返回到上一次的奖励值进行离线训练,可以提高算法的收敛速度。最后通过搭建仿真环境验证了算法的有效性。仿真结果表明,该算法可以提高无人机自主空战机动决策能力。