机构名称:
¥ 1.0
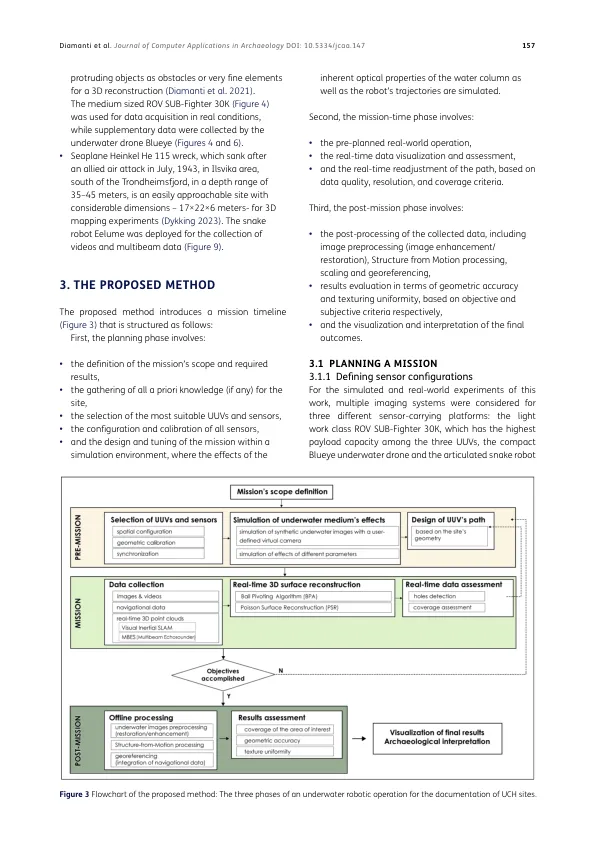
本文通过海洋机器人操作提出了一种基于视觉的3D映射的新方法3D映射。所提出的方法介绍了水下机器人任务的三个主要阶段,特别是计划阶段,任务时间和离线处理阶段。最初,我们通过多视频传感器配置和对水下培养基效果的模拟进行任务计划。随后,我们证明了使用泊松表面重建(PSR)(PSR)和枢轴旋转算法(BPA)实时3D表面重建和检测的可能性,从而可以对所获得的数据的获得的数据进行实时质量评估,并允许对现场的覆盖范围进行控制。最后,根据几何可靠性和结果的视觉外观讨论了离线摄影工作流程。在挪威特朗德海姆(Trondheim)峡湾的三个残骸地点的模拟和现实环境中已经开发和测试了所提供的三步方法学框架,并在挪威的峡湾中介绍了新的新型海洋机器人技术,例如明显的机器人Eelume。
从仿真环境到现实世界情景
主要关键词


相关文件推荐