XiaoMi-AI文件搜索系统
World File Search System仿真研究

根据CMOS技术的垂直P – N结光二极管的光学性能的文章仿真研究
摘要:CMOS光二极管已在微系统应用中广泛报道。本文使用COMSOL多物理学对P – N结光电二极管的设计和数值模拟,用于三种CMOS技术(0.18 µm,0.35 µm,0.35 µm和0.7 µm)和三个不同的P – N交界结构:N+/P-Substrate,P-Substrate,P+/N-N-Well/n-Well/n-Well/well/p-Subsulate。对于这些模拟,根据不同的技术设定了深度连接和掺杂剂浓度。然后,每个phodiode均在分光光度法上进行了分光光度法的特征,响应性和量子效率。获得的数值结果表明,当需要可见的光谱范围时,0.18和0.35 µM CMOS技术是具有效率最高峰的最高峰的技术,与0.7 µM技术相比。此外,比较了三个最常见的P – N垂直连接光电二极管结构。N+/p-Substrate Juints Photodiode似乎是可见范围内具有最高量子效率的一种,与文献一致。可以得出结论,光电二极管的特征曲线和暗电流值与文献中的报告一致。因此,这种数值方法允许预测光电二极管的性能,帮助在其微加工之前为每个必需的应用程序选择最佳的结构设计。

5至17岁的患有先前SARS-COV-2感染的个体的疫苗有效性:恢复项目的基于EHR的基于EHR的目标试验仿真研究
Jiajie Chen, PhD 1,2* , Yuqing Lei, MS 1,2* , Qiong Wu, PhD 1,2,4 , Ting Zhou, MD, PhD 1,2 , Bingyu Zhang, MS 1,3 , Michael J. Becich, MD, PhD 6 , Yuriy Bisyuk, MD, PhD, DSc 7 , Saul Blecker, MD, MHS 8 , Elizabeth A. Chrischilles,博士9,Dimitri A. Christakis,医学博士,MPH 10,Lindsay G. Cowell,MS,MS,PhD 11,Mollie R. Cummins,PhD,RN,RN,Faan 12,Soledad A. Fernandez,Phd 13

1 2抑制和自相矛盾的选择。 3 ValeriaV.González...
阻碍电动汽车增长(EV)的关键技术障碍是长时间充电时间,较短的电动电池寿命和电池安全性。具体来说,电动汽车充电协议对蝙蝠的寿命和安全性具有重大影响。如果没有正确充电,电池可能会寿命较短,更重要的是,充电不当会导致电池故障导致灾难性故障。为了克服这些障碍,我们提出了一种基于闭环的反馈方法,该方法可以实时最佳的快速充电协议适应电池健康,并具有主动诊断功能,从而使其在充电过程中检测到实时故障并采取纠正措施以减轻此类断层效应。我们利用蝙蝠电气热模型,明确的电池容量和功率淡入老化模型以及热故障模型来捕获电池行为。与模型结合使用,我们采用线性二次最佳控制技术来衡量基于反馈的控制算法。进行了仿真研究,以说明所提出的方案的有效性。进行了仿真研究,以说明所提出的方案的有效性。
EVTOL崩溃的结果和50英尺电池掉落测试的结果
- 目前通过降落测试的撞车道值针对燃料电池和燃油箱进行调节。由于燃油箱的流行和飞机中电池系统的新颖性,Easa采用了这些燃油箱掉落测试要求,将电池系统用作起点。FAA也在同时研究更永久的方法的同时,正在追求这一道路。- 燃油系统的滴测试需要将50英尺的几乎填充的燃料系统置于平坦的,不形成的表面上。在滴落后,监视燃油系统以泄漏或火灾。同样,电池系统应重新充电并从至少50英尺处掉落,然后监视气体或液体的泄漏以及火灾或爆炸。•此测试程序和仿真研究将提供有关与FAA和行业相关的项目的信息:
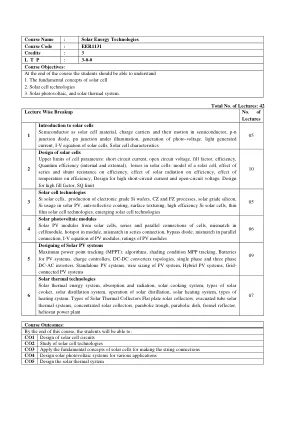
太阳能技术课程代码:EER1131 学分
序号 实验 圈数 1 太阳能 MPPT 转换器的仿真研究 2 2 降压、升压和降压-升压 DC-DC 转换器的闭环控制 2 3 太阳能光伏电网同步 2 4 风电电子转换器的建模与仿真 2 5 串并联转换器的仿真 2 6 多输入多输出转换器的研究 1 7 多输入多输出转换器的研究 1 8 DC-DC 和 DC-AC 转换器的并联运行 1 9 AC-DC-AC 转换器的研究 1 课程成果:在本课程结束时,学生将能够 CO1 了解太阳能光伏系统 CO2 了解风能转换 CO3 了解燃料电池技术 CO4 应用与电网同步技术相关的知识

通过非二元治疗和效果的因果关系的概率
事实证明,因果关系的概率在现代决策中至关重要。本文涉及估计治疗和效果不是二元时因果关系概率的问题。珍珠定义了因果关系的二进制概率,例如必要性和充分性的概率(PNS),足够的概率(PS)和必要性的概率(PN)。tian和Pearl随后使用实验和观察数据得出了这些因果关系的尖锐边界。在本文中,我们定义并为各种因果关系的概率提供了理论上的界限,并提供了多价处理和效果。我们进一步讨论了示例,我们的界限指导实际决策并使用仿真研究来评估各种数据组合的界限的信息。

可再生能源
可再生能源生产者因与风能和太阳能呈现的间歇性附加性而暴露于收入的显着波动。此外,电网中可变的可再生能源的较高渗透大大增加了与采购储量相关的成本,从而导致消费者的电力成本更高。因此,一个可以适当分配采购储量成本的市场,同时确保可再生能源生产商的收入稳定性至关重要。在这项工作中,作者提出了一种新型的基于对冲的能源市场模型,该模型允许可再生生成器从灵活的生成技术中确保对冲合同作为保险,以防止天气驱动的能源不足。拟议的模型补充了代表性的日间市场模型,并最大程度地提高了市场参与者的收入,同时降低了采购储备金和为绿色项目产生投资信号的成本。制定了数学模型,以根据Karush Kuhn Tucker(KKT)最佳条件来确定市场均衡。进行了仿真研究,以证明使用MATLAB在测试网络上提出的模型的功效。 理论结果通过模拟结果验证,并提供了一个可行的区域,在该区域中,相互可接受的对冲合同导致总体收入更高。 结果表明,可以部署基于对冲的能源市场模型,以在日常的能源市场模型中管理可再生的间歇性,以满足可再生能源生产商的风险管理需求。进行了仿真研究,以证明使用MATLAB在测试网络上提出的模型的功效。理论结果通过模拟结果验证,并提供了一个可行的区域,在该区域中,相互可接受的对冲合同导致总体收入更高。结果表明,可以部署基于对冲的能源市场模型,以在日常的能源市场模型中管理可再生的间歇性,以满足可再生能源生产商的风险管理需求。

通过动态电池重新配置对潜在的终生扩展分析
摘要 - 电气化的需求导致越来越大的电池组。由于诸如包装中的细胞位置以及人工作用过程中的变化等因素所致,因此包装在其组成细胞的性能中表现出差异。此外,由于固定细胞构型,最弱的单元格使包装极易受到这些变化的影响。可重新配置的蝙蝠包装系统,由于额外的电力电子设备而增加了控制灵活性,为这些问题提供了有希望的解决方案。尽管如此,尚未调查它们在多大程度上延长电池寿命的程度。这项仿真研究分析了Dynamic重新配置的潜力,以延长电池寿命W.R.T.几个参数。结果表明,对于串联的寿命比并联配置大。对于后者,主要因素是在生命结束时散布的等效全周期,但是耐药性随着年龄的增长而增加,并且平行的细胞数量也具有影响力。最后,对于前者,串联元素的数量会放大这些效果。
faa-niar-beta evtol电池掉落测试结果BD23A-01
▪目前通过降落测试的撞车道可供燃料电池和燃油箱进行调节。由于燃油箱的流行和飞机中电池系统的新颖性,Easa采用了这些燃油箱掉落测试要求,将电池系统用作起点。FAA也在追求这一道路,同时研究了更永久的方法。▪燃料系统的滴测试需要将50英尺的几乎填充的燃油系统置于一个不形成的表面上。在滴落后,监视燃油系统以泄漏或火灾。同样,电池系统应重新充电并从至少50英尺处掉落,然后监视气体或液体的泄漏以及火灾或爆炸。▪此测试程序和仿真研究将提供有关与FAA和行业相关的项目的信息:
使用柴油发电机,可再生生成和能量储藏的孤立微电网增强了能源管理系统
本文为远程隔离电源系统提供了增强的控制和能源管理策略。提出的控制方法包括使用超级电容器电压恢复环的混合储能系统控制。此方法改善了瞬态响应,并扩展了电池寿命,同时将SC电压保持在定义的操作范围内。为了最大程度地使用可再生能源并减少柴油发电机频繁的转机和关闭操作,新颖的电池电量停止控制系统包括在能源管理系统中。这可以改善柴油发电机的寿命并降低维护成本。在拟议的控制方法中,还引入了一种稳定控制方法,该方法有助于从网格连接模式到岛屿工作模式的无缝过渡。通过实时仿真研究验证了所提出的EMS和控制方法的有效性。