XiaoMi-AI文件搜索系统
World File Search System仿真系统

基于FPGA的混合内存仿真系统
摘要 — 混合存储器系统由新兴的非易失性存储器 (NVM) 和 DRAM 组成,已被提出用于满足应用程序日益增长的存储器需求。相变存储器 (PCM)、忆阻器和 3D XPoint 等新兴 NVM 技术具有更高的容量密度、最小的静态功耗和更低的每 GB 成本。然而,与 DRAM 相比,NVM 具有更长的访问延迟和有限的写入耐久性。两种存储器类别的不同特性指向包含多种主存储器类别的混合存储器系统的设计。在新架构的迭代和增量开发中,模拟完成的及时性对于项目进展至关重要。因此,需要一种高效的模拟方法来评估不同混合存储器系统设计的性能。混合存储器系统的设计探索具有挑战性,因为它需要模拟整个系统堆栈,包括操作系统、内存控制器和互连。此外,用于内存性能测试的基准应用程序通常具有更大的工作集,因此需要更长的模拟预热期。本文提出了一种基于 FPGA 的混合存储系统仿真平台。我们的目标是移动计算系统,该系统对能耗敏感,并且可能会采用 NVM 来提高能效。在这里,由于我们的平台专注于混合存储系统的设计,因此我们利用板载硬 IP ARM 处理器来提高模拟性能,同时提高结果的准确性。因此,用户可以使用 FPGA 逻辑元件实现其数据放置/迁移策略,并快速有效地评估新设计。结果表明,与软件 Gem5 相比,我们的仿真平台在模拟时间上加快了 9280 倍。索引术语 — 硬件仿真、FPGA 加速器、内存系统、NVM

机载气象雷达控制与仿真系统...
阮利华 西北工业大学电子信息学院,西安,中国 电子邮件:lihua.ruan13@gmail.com 李勇 于英杰 西北工业大学电子信息学院,西安,中国 摘要 —本文设计并测试了一种由显示模块、控制模块和处理模块组成的机载气象雷达控制和显示单元(CDU)的仿真系统。该系统利用虚拟仪器技术,结合实际航空特点,接收、处理并直观地向机组反映气象信息。采用功能和算法复用,成功实现了高效、逼真的综合集成系统,其中提供了实际气象雷达的主要工作模式,包括气象模式、风切变模式、湍流模式和地图模式。测试结果表明,系统具有良好的交互性、稳定性和实时性,满足仿真要求。该系统可广泛应用于培训和教学,并可移植到类似的仿真系统中。索引词 — 机载气象雷达、CDU、虚拟仪器、仿真
探索用于支持C2SIM自主系统本体扩展开发
•命令和控制系统 - 仿真系统互操作:SISO-STD-019-2020,指挥和控制系统标准 - 仿真系统互操作[包括标准军事扩展(SMX)]。SISO-STD-020-2020,命令和控制系统的土地运营标准标准 - 仿真系统的互操作。•C2SIM指南产品:Siso-guide-010-2020,指挥和控制系统指南 - 仿真系统的互操作。•在SISO网站上可用:标准:https://www.sisostandards.org/page/standardsproducts(滚动符合编号标准)指南:https://www.sisostandards.org/page/page/page/page/pasgage/pastage/standardsproducts(Scroll to scroll to the nubrance divance divance divance divance divance)
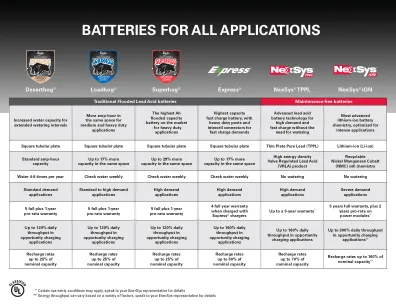
North Amer动力线卡英语0225
™找到您的最佳解决方案。enersys®从为您的车队选择正确的电源系统进行手动计算和猜测。我们将您的车队的功率数据与我们的Advance Ensite™仿真系统结合在一起,以找到支持您运营的解决方案,同时降低所有权成本。与您的本地enersys®代表联系以了解更多信息。


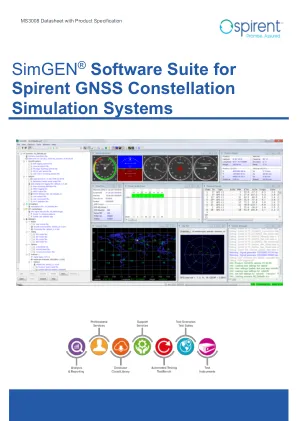
适用于 Spirent GNSS Constellation 的 SimGEN® 软件套件...
图 1 基于 SimGEN 的 GSS9000 GNSS 仿真系统示例 .............................................................................. 8 图 2 GSS7000 GNSS 仿真系统示例 .............................................................................................. 8 图 3 SimGEN 图形用户界面示例 ...................................................................................................... 9 图 4 场景树 ...................................................................................................................................... 10 图 5 车辆(天线)位置、运动和接收信号显示 ............................................................................. 11 图 6 卫星地面轨迹和天空图 ............................................................................................................. 11 图 7 典型的源编辑器 ................................................................................................................ 12 图 8 典型的星座编辑器 – 显示 GPS ............................................................................................. 13 图 9 卫星地面轨迹 ............................................................................................................................. 14 图 10 信号内容定义 – 显示 GPS ............................................................................................. 15 图 11 大气模型系数 ................................................................................................................ 16 图 12 定义车辆性能范围的个性编辑器 ................................................................................. 18 图13 赛道编辑器 ................................................................................................................................ 19 图 14 圆周运动编辑器 ...................................................................................................................... 20 图 15 飞机运动命令编辑器 ................................................................................................................ 21 图 16 航天器位置编辑器 ................................................................................................................ 24 图 17 地形遮挡编辑器 ...................................................................................................................... 26 图 18 天线模式编辑器 ...................................................................................................................... 27 图 19 天线杠杆臂 ............................................................................................................................. 27 图 20 Sim3D™ 环境表示 ................................................................................................................ 28 图 21 统计多径类别掩模编辑器 ............................................................................................................. 29 图 22 GTx 的功率与距离建模 ..................................................................................................... 31 图 23 快速查看选择和记录 ............................................................................................................. 32 图 24 数据流 ............................................................................................................................. 33 图 25 信号类型选择 ............................................................................................................................. 34 图 26 GBAS 消息类型 1 和 2 编辑器示例 ...................................................................................... 38

空空导弹自导系统设计与仿真
用于追踪移动目标的导弹制导。导弹制导系统本身由导弹动力学、控制系统、导引头和制导方法组成。一般来说,导弹动力学方法将使用非线性运动方程。将要讨论的控制面遵循 BTT(倾斜转弯)规则,将要使用的控制系统是广泛用于控制设计的 PID 控制系统。最后,这里将研究的制导方法是比例导航和恒定方位航向方法。将使用 MATLAB Simulink 进行仿真。Simulink 模型由目标动力学和制导系统组成。从仿真结果可以看出,导弹可以很好地追踪目标。因此,仿真系统可以很好地用于初步设计目的。

分布式水下战争模拟...
预测武器系统的性能很难用数学方程来估计,因为要考虑的变量很多。建模和仿真技术已经提出了可以评估武器系统开发和部署的最佳解决方案。模拟目的是设计模拟系统的决定性因素,但为每个目的开发一个模拟器成本高、不迅速、不灵活。分布式仿真系统通过将现有的模拟器与系统连接起来,允许以经济的输入资源进行大规模模拟,并且可以灵活、快速地重新设计系统以用于其他目的。本研究使用最初为军事模拟设计的 Delta3D 模拟游戏引擎在分布式系统中实现水下战争模拟,由于水下作战受环境情况影响最大,因此模拟系统交换环境数据。本研究采用 SEDRIS 处理环境数据,采用 HLA/RTI 处理分布式系统。