XiaoMi-AI文件搜索系统
World File Search System传输成本
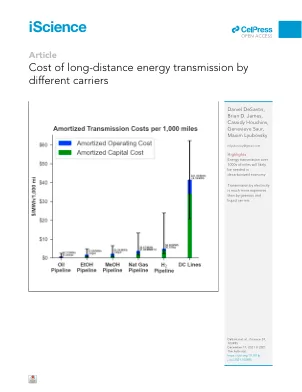
不同运营商的长距离能源传输成本
摘要 本文比较了电力、气态和液态载体(电燃料)进行长距离、大规模能源传输的相对成本。结果表明,每兆瓦时的电力传输成本可能比氢气管道高出八倍,比天然气管道高出约十一倍,比液体燃料管道高出二十至五十倍。这些差异通常也适用于较短距离。电力传输成本较高主要是因为与气态和液态燃料管道的能量传输能力相比,电力传输线路的承载能力(每条线路兆瓦)较低。传输成本的差异很重要,但往往被忽视,在分析各种可再生能源生产、分配和利用情景时,应将其视为重要的成本组成部分。
利益相关者工作组会议#4,2024年11月13日
12:30 pm欢迎和议程12:40 PM工作组业务1:20 PM 2024 IRP更新和短期行动计划2:00 PM休息2:10 PM IRP流程概述2:45 PM 2023 IRP和2024 IRP更新有关传输的讨论关于传输成本3:20 PM的传输成本和资源计划的讨论和资源计划4:00 PM 4:00 pm 202 pm 2026 RICC <50 pm 2026 RICC <50
可再生太阳能的比较级别的成本分析
摘要:作为通过管道的氢和通过电力进行的氢作为氢作为氢的自下而上的成本分析。使用加利福尼亚的技术经济,生成和需求数据用于计算分布之前的传输成本(LCOT)能量和电平的电力成本(LCOE)。考虑了230 kV和500 kV的高压水平,以及24英寸的24英寸管道,用于100至700英里的传输。在100英里的传输时,每种介质之间的传输成本是可比的。在较长距离的情况下,在低利用率水平下,管道场景变得越来越便宜。利用电池储能系统的全电动途径可以满足95%的负载,低至356 USD/MWH,而当通过氢气涡轮机和燃料电池路径的100%承担负载时,成本分别为278和322 USD/MWH。

EPGTD.pdf-mrcet.ac.in
中心到负载中心。这样传输成本和损耗最小。当采用直流供电系统时,这个因素最为重要。然而,在交流供电的情况下,当能量从低压转换为高压,反之亦然时,只要其他条件有利,发电厂就可以建在负载以外的地方。

昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并探究腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了受模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可最大限度地减少跟踪误差和传输成本。此外,我们通过将碳纤维棒固定在胸腹关节上,测试了限制腹部运动对活天蛾自由飞行的影响。腹部受限的飞蛾表现比假治疗飞蛾差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。


论文 昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
昆虫飞行控制研究主要集中在翅膀的作用上。然而,飞行过程中腹部的偏转可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并询问腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可以最大限度地减少跟踪误差和传输成本。此外,我们通过在胸腹关节上固定碳纤维棒来测试限制腹部运动对活天蛾自由飞行的影响。腹部受限的飞蛾表现比假治疗飞蛾差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。
昆虫飞行中的腹部运动重塑非气动结构对飞行机动性的作用 I:花朵追踪的模型预测控制
昆虫飞行控制研究主要集中在翅膀的作用上。然而,飞行过程中腹部的偏转可能会影响飞行动力学。本文评估了机身变形在飞行中的作用,并探究腹部对飞行机动性的贡献程度。为了解决这个问题,我们结合使用了模型预测控制 (MPC) 启发的计算惯性动力学模型和天蛾 Manduca sexta 的自由飞行实验。我们探索了欠驱动(即输出数量大于输入数量)和完全驱动(输出和输入数量相等)系统。使用无量纲跟踪误差和传输成本等指标来评估惯性动力学模型的飞行性能,我们表明完全驱动模拟可以最大限度地减少跟踪误差和传输成本。此外,我们还通过在胸腹关节上固定一根碳纤维棒来测试限制腹部运动对活天蛾自由飞行的影响。腹部受限的蛾子表现比假治疗蛾子差。这项研究发现腹部运动有助于飞行控制和机动性。这种非气动结构的运动存在于所有飞行类群中,可以为多驱动微型飞行器的开发提供参考。