XiaoMi-AI文件搜索系统
World File Search System伺服机构
技术学士(机械工程...
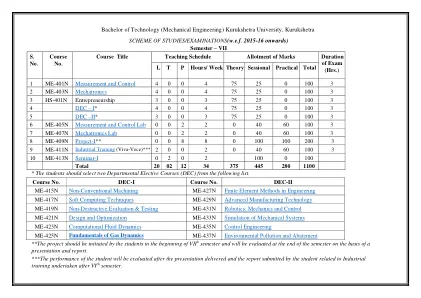
控制分析:控制系统简介、分类、控制系统术语、伺服机构、过程控制和调节器、手动和自动控制系统、物理系统和数学模型、线性控制系统、拉普拉斯变换、传递函数、框图、信号流图。参考书和教科书:1.机械测量和控制 - 作者:D.S.Kumar,Metropolitan 书 2.仪器和机械测量 - 作者:A.K.Tayal,Galgotia Publ.3.测量系统应用与设计-作者 Ernest Doebelin,McGraw-Hill 4.自动控制系统-作者 S. Hasan Saeed 注意:在学期考试中,考官将总共设置 8 个问题,每个单元至少有一个问题,学生只需尝试回答 5 个问题。

飞机维修工程 - Bteup
目录 _________________________________________________________________ 序号 详情 页码 _________________________________________________________________ I. 学习及评估方案 II. 课程主要特色 1 III.专家名单 2 详细课程内容 1. 第一学期 1.1 数学-I 3 - 4 1.2 物理-I 5 - 6 1.3 通用工程与地面支持 7 - 9 1.4 工程制图 10-11 1.5 航空法规、CAR 和人体性能-I 12-13 1.6 研讨会 14-18 2. 第二学期 2.1 数学-II 19 2.2 物理-II 20-21 2.3 力学 22-23 2.4 基础电气与电子工程 24-27 2.7 航空器材料与材料科学 28-30 2.8 航空法规、CAR 和人体性能-II 31-32 3. 第三学期 3.1 机身与系统 33-36 3.2 通用航空发动机 37-39 3.3 飞机电气工程-I 40-42 3.4 飞机电子系统 43-45 4. IV 学期 4.1 飞行理论 46-47 4.2 飞机仪表-I 48-50 4.3 自动飞行与伺服机构 51-52 4.4 飞机通信系统 53-55 5. V 学期 5.1 计算机理论 56-57 5.2 飞机电气系统-II 58-60 5.3 飞机仪表-II 61-63
飞机维修工程 - Bteup
目录 _________________________________________________________________ 序号详情 页码_________________________________________________________________ I.学习与评估方案 II.课程主要特点 1 III.专家名单 2 详细课程内容 1.I 学期 1.1 数学-I 3 - 4 1.2 物理-I 5 – 6 1.3 一般工程与地面支持 7 - 9 1.4 工程制图 10-11 1.5 航空法、C.A.R.& 人类表现-I 12-13 1.6 研讨会 14-18 2.II 学期 2.1 数学-II 19 2.2 物理-II 20–21 2.3 力学 22-23 2.4 基础电气与电子工程 24-27 2.7 航空器材料与材料科学 28-30 2.8 航空法、C.A.R.& 人类表现-II 31-32 3.III 学期 3.1 机身与系统 33-36 3.2 通用航空发动机 37-39 3.3 飞机电气工程-I 40-42 3.4 飞机电子系统 43-45 4.IV 学期 4.1 飞行理论 46-47 4.2 飞机仪表-I 48-50 4.3 自动飞行与伺服机构 51-52 4.4 飞机通信系统 53-55 5.V 学期 5.1 计算机理论 56-57 5.2 飞机电气系统-II 58-60 5.3 飞机仪表-II 61-63
5AN3 飞机系统单元 1 说明.pdf
简介 飞行控制系统的架构对所有飞行操作都至关重要,多年来,其架构发生了重大变化。首次飞行后不久,铰接式表面就被引入用于基本控制,由飞行员通过电缆和滑轮系统进行操作。这项技术存活了几十年,现在仍用于小型飞机。大型飞机的引入和飞行包线的增加使得飞行员的肌肉力量在许多情况下不足以抵消由于表面偏转而产生的气动铰链力矩;该问题的第一个解决方案是引入气动平衡器和调整片,但飞机尺寸和飞行包线的进一步增长带来了对动力系统的需求,以控制铰接式气动表面。如今,可以找到两大类飞行控制系统:滑翔机和小型通用航空的全机械控制,以及大型或战斗机的动力或伺服辅助控制。伺服机构引入后,最大的附加效应之一就是可以使用主动控制技术,直接作用于飞行控制执行器,从而带来一系列好处: • 补偿基本机身的空气动力学缺陷; • 稳定和控制通常性能更高的不稳定飞机; • 大迎角飞行; • 自动失速和旋转保护; • 阵风缓解。

PS Goel 博士
Prem Shankar Goel 于 1947 年 4 月 20 日出生于印度北方邦莫拉达巴德区 Dhabarsi 村。他在焦特布尔大学获得电气工程学士学位,在班加罗尔印度科学研究所获得应用电子与伺服机构硕士学位,并在班加罗尔大学获得博士学位。他的职业生涯始于在特里凡得琅发起旋转 RS-1 卫星的卫星姿态控制系统活动,后来作为 Arya Bhata 项目团队的一员搬到班加罗尔。他开发了自旋轴定位系统 Bhaskara I 和 II 卫星、旋转 Rohini 系列卫星的磁控制、用于 APPLE 的动量偏置 3 轴控制系统、用于 IRS 的零动量偏置 3 轴控制系统、用于高度稳定的 INSAT-2 的 V 型配置动量偏置姿态控制系统。他为点成像任务 TES 开发了具有步进和凝视能力的高度灵活的控制系统,并通过 SRE 任务指导了再入能力的演变。

周文清先生于 2004 年入选
周文清先生 1919 年出生于中国太原,靠近蒙古边境。1940 年,他获得上海交通大学电气工程学士学位,1942 年获得麻省理工学院理学硕士学位。他的硕士论文题为“塞尔森机研究”,研究的是通常所说的闭环控制系统或伺服机构。作为后者的自然延伸,通用电气在二战期间聘请他根据有关日本零式战斗机的情报重新设计防空火控系统。20 世纪 50 年代,周先生在美国博世武器公司的武器部门工作,负责 Atlas (WS-107A) 洲际弹道导弹 (ICBM) 的数字计算机和全惯性制导系统的设计、开发和批量生产。 1951 年,他构想出一种惯性制导系统,用于自动导航太空飞行器,随后他设计出第一台全固态、高可靠性的太空数字计算机,并建立了洲际弹道导弹、太空助推器和载人航天器(从 Atlas、Titan、Saturn 和 Skylab 到 Minuteman 和航天飞机)制导系统的开发和机械化的基本系统方法。1956 年至 1958 年间,周先生发表或发表了几篇关于导弹制导系统的重要论文,其中一篇题为“机载晶体管数字计算机的设计理念

使用遗传算法进行基于模型的机电执行器故障检测和识别预测
摘要:飞机控制面的传统液压伺服机构正逐渐被机电执行器 (EMA) 等新技术所取代。由于 EMA 才刚刚采用,因此无法获得有关其可靠性的现场数据,其故障模式尚未完全了解;因此,有效的预测工具可以帮助检测飞行控制系统的早期故障,以便正确安排维护干预和执行器更换。这将带来双重好处:通过避免飞机在部件受损的情况下飞行,可以提高安全性,并且可以防止更换仍能正常工作的部件,从而降低维护成本。然而,由于受监控系统的复杂性和多学科性质,EMA 预测提出了挑战。我们提出了一种基于模型的故障检测和隔离 (FDI) 方法,采用遗传算法 (GA) 在系统性能开始受到影响之前识别故障前兆。考虑了四种不同的故障模式:干摩擦、间隙、部分线圈短路和控制器增益漂移。本文提出的方法能够以比数据驱动策略更有效的方式利用系统设计知识来应对挑战,并且需要的实验数据更少。为了测试所提出的工具,开发了一个模拟测试台。实施了具有不同详细程度的 EMA 的两个数值模型:高保真模型提供了要分析的故障执行器的数据,而更简单的模型,计算量更小,但足够准确以模拟所考虑的故障模式,由 GA 迭代执行。结果显示,该系统具有良好的稳健性和精确度,能够早期识别系统故障,且误报或漏报很少。