XiaoMi-AI文件搜索系统
World File Search System位置反馈

具有集成刚度的紧凑型气动离合器……
摘要 — 刚度变化和实时位置反馈对于任何机器人系统都至关重要,但最重要的是对于有源和可穿戴设备与用户和环境的交互。目前,对于紧凑尺寸,缺乏提供高保真反馈并保持设计和功能完整性的解决方案。在这项工作中,我们提出了一种新型最小离合器,它集成了刚度变化和实时位置反馈,其性能优于传统的卡住解决方案。我们详细介绍了离合器的集成设计、建模和验证。初步实验结果表明,在最大力密度为 15.64 N/cm 2 时,离合器的阻抗力变化接近 24 倍。我们通过实验验证了离合器在以下方面的表现:(1) 增强软执行器的弯曲刚度,使软操作器的夹持力提高 73%;(2) 使软圆柱执行器能够执行全向运动;(3) 为手势检测提供实时位置反馈,为动觉触觉反馈提供阻抗力。本文介绍了功能组件,重点介绍了集成设计方法,这将对软机器人和可穿戴设备的发展产生影响。

SP400 电动气动智能定位器 - 斯派莎克
3.1 描述 SP400 智能阀门定位器由 4 - 20 mA 输入信号回路供电,为气动线性和四分之一转阀门提供精确的自适应位置控制。通过阀门位置反馈保持精确控制,阀门位置反馈自动改变气动输出压力以克服阀杆摩擦和流动力的影响,从而保持所需的阀门位置。通过连续数字显示行程百分比来指示阀门位置。阀门位置反馈通过基于霍尔效应的非接触式技术检索。气动装置基于压电阀技术 - 因此,在稳定状态下可保证高分辨率、高可靠性、抗振动性和极低的空气消耗。SP400 包含许多智能功能,可以通过菜单驱动软件使用集成键盘和 LCD 字母数字数据进行完全编程。阀杆和定位器之间没有机械连接,大大简化了安装程序并减少了所需时间。此外,软件的设计尽可能简化了操作:调试只需将 SP400 组装到阀门上并按下一个按钮即可。SP400 配有 NAMUR 标准安装套件,用于连接到轭架或柱式安装执行器。对于四分之一转阀门,提供符合 VDI / VDE 3845 的安装套件。
用于物理人体型操纵器合作的硬件式模拟器
摘要 - 本文介绍了与空中操纵器合作的硬件模拟器。模拟器为用户提供了适用于人冲水器交互活动的逼真的触觉反馈。测量硬件界面和Human/环境之间交换的力,并提供给动态模拟的空中操纵器。反过来,模拟的空中平台将其位置反馈到硬件,从而使人类能够感觉到并评估相互作用的效果。除了人冲洗操作器的合作外,模拟器还提供了发展和测试空中操纵中的自主控制策略。因此,对拟议系统的有效性以及两个案例研究进行了评估:一个协作任务,其中人类操作员将工具附加到机器人最终效用器和一个自动鸟分流器的安装任务。
支持 CAN 的电子排量控制
伊顿的 2 系列泵采用 CAN 启用电子排量控制 (EDC),为移动闭式泵应用提供一流的电液控制。这种高性能水平是通过基于微处理器的智能控制和利用电子泵斜盘位置反馈的电比例泵控制的独特组合实现的。作为命令输入接口,该控制器利用 SAE J1939 CAN 消息协议,为集成到各种移动和固定驱动系统提供最大的灵活性。此类系统可能包括单个或多个泵,同时允许通过中央控制器或 PLC 进行独立的泵控制。使用伊顿 Ultronics™ 单轴或双轴操纵杆以及集成 CAN J1939 接口的其他市售操纵杆,也可以实现与 CAN 启用 EDC 的直接操作员接口。
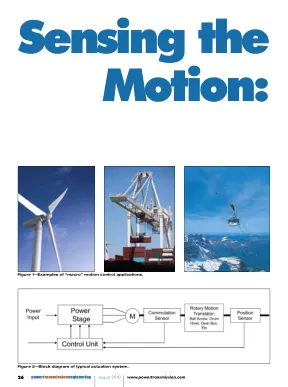
感知运动 - Micronor Sensors Inc.
管理摘要 运动控制需要反馈。没有反馈,就没有受控运动。位置传感器是运动控制系统的关键要素,无论主要动力是液压、气动还是电力。位置反馈传感器选项众多,反映了从机电到电子到光电子到最先进的光纤等各种技术。设计决策通常基于多种因素,包括环境、可靠性、冗余、安全性和可靠性。这些应用还可以反映出保守主义与先进主义在旧学派与新学派工程激烈冲突中的优势。本文概述了更常见的位置传感器选项,并引用实际案例研究来说明可用的各种解决方案以及某些决策背后的原因。使用三个案例来说明不同应用的需求导致选择特定类型的位置传感器。所审查的案例包括龙门起重机、风力涡轮机和空中缆车。
数据表 - 546 Pro 型球阀
• 标准配备可锁定杆 • 带/不带电气位置反馈的手动阀或驱动阀 • 符合人体工程学的手柄,带有集成工具以打开联合衬套 • 杆内贴标签(可选) • 集成固定系统,带有安装好的螺纹嵌件作为标准配置 • 垫片保持管道系统的线路并简化安装 • 可以进行单独的在线配置 • 唯一的数据矩阵代码用于可追溯性 • 无油和 LABS 清洁版本 • 非常高的流量 • 通用接口使得可以与所有执行器组合 • 手动弹簧复位装置(死人杆) • 泄压井可以避免可能的气体积聚(例如用于 H2O2) • 由于特殊球(开启角度按比例缩放),可提供具有线性流动特性的版本

自动对准太阳能的设计和实施...
本文介绍了闭环太阳能跟踪系统的设计和实现。随着对电能的需求不断增长以及燃料消耗引起的环境污染不断增加,对清洁能源的需求也随之增加。在这些能源中,太阳能被认为是最可行的,因为它在不同环境中广泛可用且易于操作。本研究的主要目的是通过设计高效且低成本的太阳能跟踪系统来最大限度地提高光伏发电量并减少二氧化碳排放。设计和构建了对齐的闭环太阳能跟踪器以实现最佳精度。所提出的系统在运动方面表现出更大的自由度,以克服与框架支架倾斜相关的问题。使用基于 Flowcode 编程语言的 PIC 微控制器,使用光传感器检测位置反馈,并使用 H 桥驱动器控制两个直流电机。根据实验结果,与固定式太阳跟踪系统相比,所提出的系统效率有显著提高。

ICot 智能定位器本质安全、防爆
• 3 按钮界面和图形 LCD,便于校准和信息显示。• 轻松配置分程和反向作用操作。• 轻松访问接线端子连接器 • 通过霍尔效应传感器进行非接触式阀门位置测量。无需驱动臂、连杆,提高整体分辨率、准确性和可靠性。• 高级自动校准。• 可通过用户控制调节阀门速度。• 可选干式接触限位开关。• 可选 4-20 mA 位置反馈变送器 - 仅限 HART ® 版本。• 适用于较大执行器/阀门的高流量滑阀选项。在某些应用中无需使用音量增强器。• 适用于旋转应用的高可见位置指示器。• 可轻松容纳大行程阀门,例如刀闸阀。• 与 AMS™ 软件和 DTM 完全兼容。• 坚固的铝和不锈钢外壳可提供最大程度的保护 - 6000 系列。• 工程树脂外壳坚固而轻巧,具有出色的耐化学性、抗紫外线性和抗冲击性 - 5000 系列。

AVID SMARTCAL 智能定位器非...
• 通过霍尔效应传感器进行非接触式阀门位置测量。无需驱动臂、连杆,提高整体分辨率、准确性和可靠性。• 3 按钮界面和图形 LCD 用于自动校准和信息显示。• 可忽略不计的泄漏,减少空气消耗。• 单按钮高级自动校准。• 可通过用户控制调节阀门速度。• 轻松配置分程和反向作用操作。• 适用于较大执行器/阀门的高流量滑阀选项。在某些应用中无需使用音量增强器。• 标准 4-20 mA 位置反馈变送器 - 仅限 HART ® 版本。• 可选配干式接触限位开关。• 适用于旋转应用的高度可见位置指示器。• 可轻松容纳大行程阀门,例如刀闸阀。• 与 AMS™ 软件和 DTM 完全兼容。• 坚固的铝和不锈钢外壳可提供最大程度的保护。• 工程树脂外壳坚固而轻巧,具有出色的耐化学性、抗紫外线性和抗冲击性。

SVI II - 达尔维科
灵活性和多功能性:Masoneilan 的 SVI ® II 数字阀门定位器为任何过程控制应用提供高性能解决方案。SVI II 使用 HART ® 通信协议提供高级特性和功能。它设计用于任何控制阀系统,使其成为真正的通用控制解决方案。准确性和精密度:最终控制元件的性能对于任何过程控制系统的整体运行效率都至关重要。SVI II 提供极其准确和精确的控制阀定位,从而实现高过程效率和出色的产品产量。此外,由于操作负荷减少,所有相关系统组件和设备的可靠性都将提高。非接触式位置传感器:使用固态霍尔效应传感器实现阀门位置感测。该传感器突出到外壳背面的延伸部分,但不会穿透壳体壁。它监测连接到阀轴/阀杆的磁环的位置,从而向定位器提供极其精确的位置反馈。这种非接触式设计通过消除传感器磨损和外壳穿透,大大提高了使用寿命可靠性。坚固的模块化结构:SVI II 的每个主要部分都设计成单独的模块,以便于维护和现场维修。气动传动系统、电子部分和安装系统都有单独的模块,每个模块都有自己经过验证的坚固设计。这也为根据需要升级提供了灵活性,例如高级诊断和 PID 过程控制。