机构名称:
¥ 1.0
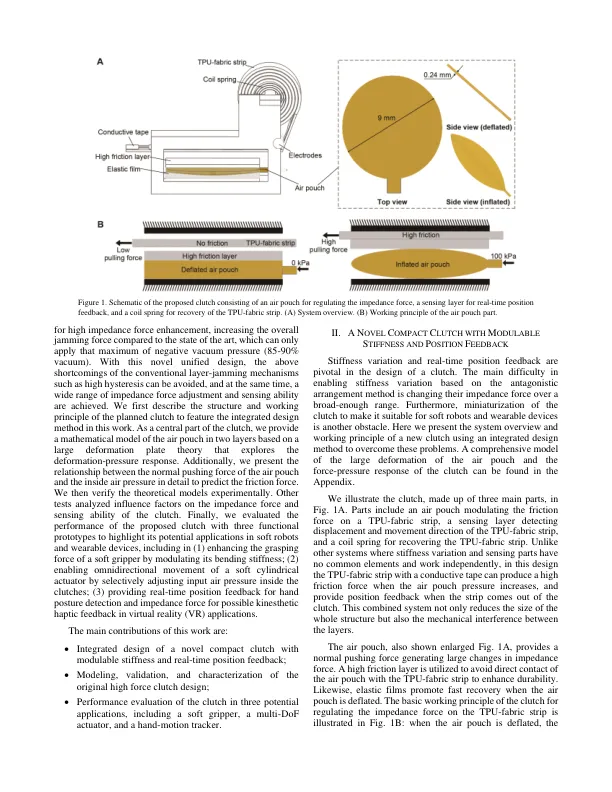
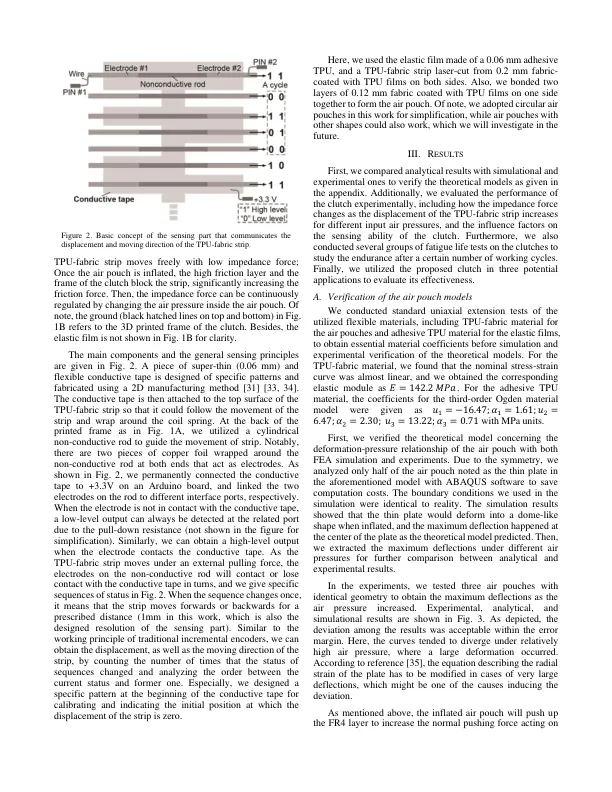
摘要 — 刚度变化和实时位置反馈对于任何机器人系统都至关重要,但最重要的是对于有源和可穿戴设备与用户和环境的交互。目前,对于紧凑尺寸,缺乏提供高保真反馈并保持设计和功能完整性的解决方案。在这项工作中,我们提出了一种新型最小离合器,它集成了刚度变化和实时位置反馈,其性能优于传统的卡住解决方案。我们详细介绍了离合器的集成设计、建模和验证。初步实验结果表明,在最大力密度为 15.64 N/cm 2 时,离合器的阻抗力变化接近 24 倍。我们通过实验验证了离合器在以下方面的表现:(1) 增强软执行器的弯曲刚度,使软操作器的夹持力提高 73%;(2) 使软圆柱执行器能够执行全向运动;(3) 为手势检测提供实时位置反馈,为动觉触觉反馈提供阻抗力。本文介绍了功能组件,重点介绍了集成设计方法,这将对软机器人和可穿戴设备的发展产生影响。
具有集成刚度的紧凑型气动离合器……
主要关键词

相关文件推荐