XiaoMi-AI文件搜索系统
World File Search System作用力

磁性摩洛电纳米生成器的进步
抽象的摩擦电纳米生成剂(TENG)以其出色的能力来利用环境的机械能力而闻名,由于其成本效益,高输出和适应性,因此引起了极大的关注。本评论通过对涵盖结构,材料和自动传感系统的磁辅助tengs进行全面而深入的分析,提供了独特的观点。我们系统地总结了Tengs的磁辅助功能,包括系统刚度,混合电磁 - 三元电极的组件,传输和相互作用力。在材料域中,我们回顾了磁性纳米复合材料的掺入,以及基于铁氟利的TENG和微观结构验证,这些验证也已根据现有研究进行了汇总。此外,我们深入研究了磁性辅助tengs中物理量传感和人机界面的研究进度。我们的分析强调,磁辅助超出了磁场下的排斥力和吸力,从而在改善tengs的输出性能和环境适应性方面发挥了多方面的作用。最后,我们提出了普遍的挑战,并提供了对磁辅助Tengs开发的未来轨迹的见解。

战略远见:动态场景计划
2场景规划方案计划已使用了多年。最新的情景规划文章和书籍的出版物表明,场景规划比以往任何时候都更加受欢迎,并且“该公司在计划不确定的未来方面从未发现过价值”(Rigby and Bilodeau,2007年,第22页)。Wack(1985b,p。146)指出:“场景有两个主要目的。第一个是保护性的:预期和理解风险。第二个是企业家:发现您以前没有意识到的战略选择”。本质上,使用情景方法意味着写三到四个关于未来的深度故事,围绕许多图或逻辑的不同组合而发展(Schwartz,1996)。每个故事或场景都应在内部保持一致(Wack,1985a)。根据Ralston和Wilson(2006,p。16)的说法,情景是“他们描述相互作用力的不断发展的动态,而不是单个终点未来的静态图片”的故事。所有场景都围绕同一问题发展:了解和/或决定。然而,起点是隔离和提出一个建立情景的战略问题或重点问题(Schwartz,1996,Ringland,1998; Van der Heijden 1996,2005)。这可能是有关组织,社会或任何其他感兴趣的主题的问题或决定。
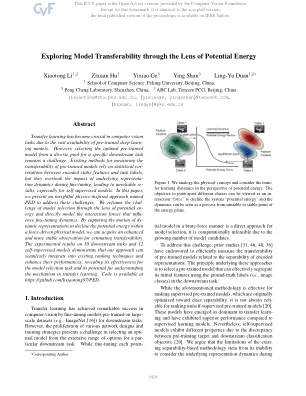
通过势能视角探索模型的可转移性
由于预训练的深度学习模型大量可用,迁移学习在计算机视觉任务中变得至关重要。然而,从多样化的模型池中为特定的下游任务选择最佳的预训练模型仍然是一个挑战。现有的衡量预训练模型可迁移性的方法依赖于编码静态特征和任务标签之间的统计相关性,但它们忽略了微调过程中底层表示动态的影响,导致结果不可靠,尤其是对于自监督模型。在本文中,我们提出了一种名为 PED 的富有洞察力的物理启发方法来应对这些挑战。我们从势能的视角重新定义模型选择的挑战,并直接模拟影响微调动态的相互作用力。通过捕捉动态表示的运动来降低力驱动物理模型中的势能,我们可以获得增强的、更稳定的观察结果来估计可迁移性。在 10 个下游任务和 12 个自监督模型上的实验结果表明,我们的方法可以无缝集成到现有的排名技术中并提高其性能,揭示了其对模型选择任务的有效性以及理解迁移学习机制的潜力。代码可在 https://github.com/lixiaotong97/PED 上找到。

超孔水凝胶
药房1,2,3 Shri Jagdishprasad Jagdishprasad jhabarmal tibrewala University,Jhunjhunu Rajasthan,印度摘要:超孢子水凝胶最初是作为保留胃肠道和吸收胃药媒体吸收高级药物的创新药物输送系统开发的。本评论介绍了基于一代的超孢子水凝胶的分类。由分子纠缠创建的亲水聚合物网络可吸收其干重的数千倍。这些系统迅速扩展并忍受胃中非常酸性的条件。这种水凝胶由于毛细作用力而迅速膨胀,这是由于吸水通过其开放孔隙率结构驱动的。该技术通过精确靶向吸收位点来增强溶解度和生物利用度。传统的超孢子水凝胶的机械强度不足,这是通过第二代超孢子水凝胶复合材料和第三代超孢子水凝胶混合体的发展来解决的。本文主要介绍超孢子水凝胶关键词的分类,方法,药物加载,学术文章,特征和用途:胃保留,交叉链接,超孢子水凝胶,肿胀速率,弹性特性,弹性特性,水亲聚合物网络

改变触觉反馈收益对平衡的影响由感觉冲突估算
抽象轻轻接触实心物体会减少姿势摇摆。在这里,我们确定人为修改触觉反馈以达到平衡的效果。参与者闭着眼睛站着,轻轻地抓住了一个与身体摇摆同步移动的杂志,以系统地增强或减弱+2至2之间的反馈增益,分别对应于与身体相同或相反方向的运动。这种干预对姿势摇摆有系统的影响,姿势摇摆表现出不对称的U形功能,相对于触觉反馈增益。旋转在零增益周围的最小值,对应于静态对象。摇摆以低于-0.25的收益略有增加,但在+0.25以上的增长下大大增加。在+2时,大约是无接触条件的两倍。手和manipulandum之间的平均相互作用力在整个过程中保持<0.9 n,尽管它在极端增长下略有增加。在最少摇摆条件下,手部力和躯干位置之间的互相关最高,这表明更高质量的触觉反馈与更大的摇摆减少有关。我们使用反馈控制模型成功地复制了摇摆行为,该模型在触觉和本体感受信号之间的差异达到阈值时会减弱触觉反馈信号。我们的发现表明,中枢神经系统可以利用增强的触觉反馈来实现Bal-ance,但只有对自然反馈增益的变化相对较小。在健康的志愿者中,它比静态物体提供了最小的好处。触觉反馈是最佳的。

福克兰群岛立法议会议事日程......
(c) 航空器失踪或完全无法接近; “委派代表”是指一国根据其资格指派的、为参加另一国进行的调查的人员; “顾问”是指一国根据其资格任命的、为协助其委派代表进行调查的人员; “机场当局”就机场而言,是指管理机场的人员; “航空器”是指在大气中能利用空气反作用力(空气对地球表面的反作用力以外的作用力)获得支撑的任何机器; “原因”是指如若消除或避免则可防止事故发生或可减轻所造成的伤害或损害的行为、疏忽、条件或情况; “首席调查员”是指根据第 8 条任命的首席航空事故调查员; “缔约国”是指《芝加哥公约》的任何缔约国; “促成因素”是指行为、疏忽、事件、情况或其组合,如被消除、避免或不存在,则可降低事故或事故征候发生的概率,或减轻事故或事故征候后果的严重性;“机组”包括运营人在飞行中的航空器上雇用或聘用的与航空器运行有关的所有人员,如果运营人和机长是同一个人,则包括机长;“专家”是指因事故造成其公民死亡或重伤而对事故有特殊利益的国家任命的人员;“致命伤害”是指人员在事故中受到的伤害,并导致其在事故发生之日起 30 天内死亡;“飞行记录仪”是指为补充事故或事故征候调查而安装在航空器上的任何类型的记录仪,包括飞行数据记录仪、驾驶舱语音记录仪和图像记录仪;

伊斯蘭德2410048.pdf
喷嘴用作排气系统,以极高的速度排出推进剂气体。喷嘴在所有飞行条件下提供推力。它们是推进系统的主要部件,可将高压气体中储存的能量转化为推力,推动飞机或航天器前进。这确实会影响喷嘴的设计和优化,例如钟形、锥形或塞式喷嘴 - 虽然从理论上讲,甚至影响很大,影响燃油效率、有效载荷能力和任务的成功完成等问题。对于太空探索任务等复杂任务,喷嘴对于增强航天器的推进系统至关重要。当真空条件占主导地位时,例如在深空的情况下,喷嘴设计将变得更加重要,因为大气施加的压力直接影响废气的膨胀方式。火箭喷嘴的效率最终将决定哪种火箭是省油的,哪种火箭是成功的太空任务的完成者:发射卫星、向空间站运送货物,还是推动对遥远行星和卫星的探索任务。随着对太空的进一步探索,喷嘴将成为航天器中一项非常重要和创新的技术,反映了航空航天工程的未来发展方向。数百万美元的研究确实有道理。无论它是火箭还是喷气发动机的一部分,喷嘴都是提供速度和效率的装置,可以推动飞机飞向空中。现代飞机、喷气发动机和涡轮机喷嘴有三个用途:推力、将废气带回自由流以及设定发动机的质量流速。喷嘴位于动力涡轮机的下游。制造推力所遵循的原理是牛顿第三运动定律:每个作用力都有一个大小相等、方向相反的反作用力。

触觉增强的完整上肢外骨骼接口
摘要:操纵既涉及精细的触觉反馈,又涉及FingerPad机械感受器感知的动态瞬变,也涉及动态触觉反馈,而动态触觉反馈则涉及整个手肌肉骨骼结构。在远程操作实验中,这些基本方面通常在操作员侧的不同设置之间进行分配:使用轻质手套和光学跟踪系统的那些设置,朝向仅触觉反馈的那些,以及那些实现外观骨骼或接地操纵器作为具有抗hepticic设备的hepticic设备,可提供KinaEsticic Enceptics。在手界面的水平上,提供动力学力反馈的外骨骼在最大渲染力和嵌入式执行器的带通之间进行了权衡,从而使这些系统无法正确地呈现触觉反馈。为了克服这些局限性,在这里,我们研究了一个完整的上肢外骨骼,覆盖了从肩部到手指裂料的所有上肢身体部位,并在指尖与线性语音盘绕器执行器结合。这些是为了呈现宽带触觉反馈以及手部外骨骼提供的动力学力反馈。在两个不同的反馈条件下(仅视觉和视觉供应),我们将在采摘远程操作任务中调查系统。根据测量的相互作用力和正确试验的数量进行了评估和比较。这项研究证明了能够组合的动觉和触觉触觉反馈的复杂的全肢外骨骼(七个肢体驱动的DOF加五个手动DOF)的总体可行性和有效性。定量结果表明,当提供触觉反馈时,尤其是对于均值和峰值施加的力,以及拾取和地位任务的正确速度时,效果的改善显着。

人工智能智能算法能够自动表征所应用频率的正负介电泳范围
摘要:本研究描述了一种现象学方法,用于自动确定正负介电泳 (DEP) 的频率范围——一种可用于大规模并行微纳米组装的电动力。实验装置由带有金微电极阵列的微加工芯片组成,该芯片连接到一个函数发生器,该函数发生器能够数字控制 1 V(峰峰值)的交流信号和 10 kHz 至 1 MHz 范围内的各种频率。乳胶微珠(直径 3 µ m)的悬浮液在 DEP 力的影响下被吸引或排斥在微电极上,这是施加频率的函数。珠子运动的视频通过连接到显微镜的数码相机捕捉。OpenCV 软件包用于对图像进行数字分析并识别珠子。通过人工智能 (AI) 算法比较已识别珠子的连续帧位置,该算法确定微珠的云行为,并通过算法确定珠子是否受到电极的吸引或排斥。根据确定的珠子行为,算法将增加或减少应用的频率并执行由计算机控制的函数发生器的数字命令。因此,研究平台的运行完全自动化。AI 引导平台已确定正 DEP (pDEP) 在 500 kHz 频率以下活跃,负 DEP (nDEP) 在 1 MHz 频率以上有证据,交叉频率在 500 kHz 和 1 MHz 之间。这些结果与之前发表的通过实验确定的乳胶微珠的频率相关 DEP 行为一致。本研究描述的由实时 AI 引导反馈回路辅助的现象学方法将有助于主动操纵系统以实现期望的现象学结果,例如在电极处收集粒子,即使由于相互作用力的复杂性和多样性,无法进行基于模型的预测。

有丝分裂纺锤体中协同微管和动粒动力学的双稳态和振荡
摘要。在有丝分裂纺锤体中,微管在中期通过捕获键附着在动粒上,微管解聚力引起随机染色体振荡。我们研究了纺锤体模型中的协同随机微管动力学,该模型由一组平行微管组成,这些微管通过弹性接头附着在动粒上。我们包括微管的动态不稳定性以及弹性接头对微管和动粒的作用力。采用基于福克-普朗克方程的平均场方法,对外力作用于动粒的单侧模型进行分析求解。该解建立了微管集合的双稳态力-速度关系,与随机模拟一致。我们推导出双稳态的接头刚度和微管数的约束。单侧纺锤体模型的双稳态力-速度关系导致双侧模型中的振荡,这可以解释中期随机染色体振荡(方向不稳定性)。我们推导出中期染色体振荡的连接体刚度和微管数的约束。将极向微管通量纳入模型,我们可以解释实验观察到的极向通量速度高的细胞中染色体振荡的抑制。然而,在存在极向喷射力的情况下,染色体振荡持续存在,但幅度减小,姊妹动粒之间有相移。此外,极向喷射力是必要的,以使染色体在纺锤体赤道处对齐,并稳定两个动粒的交替振荡模式。最后,我们修改了模型,使得微管只能对动粒施加拉力,从而导致两个微管集合之间发生拉锯战。然后,到达动粒后诱发的微管灾难是刺激振荡的必要条件。该模型可以定量再现 PtK1 细胞中动粒振荡的实验结果。