XiaoMi-AI文件搜索系统
World File Search System信号控制

QI-TraSiCo 量子交通信号控制
为了准备将量子启发式交通控制系统投入实际道路使用,DLR ITS 实验室也在对其进行测试。DLR ITS 实验室提供所有交通技术和技术设备,这些技术和设备也适用于典型的道路交叉口。这些设备尤其包括交通信号控制单元。因此,可以验证和优化量子启发式控制系统与实际交通技术之间的相互作用,以便在测试现场推广。
基于 KNX 的脑信号控制照明系统(...
摘要:KNX 协议被广泛用作楼宇和家庭自动化以及控制照明、暖通空调、遮阳和安全系统的标准,此外,人们越来越需要通过脑信号来控制电器,以帮助行动不便的人。因此,将 KNX 协议和脑信号 (EEG) 结合起来,提出一个基于 KNX 的系统(例如由脑信号直接控制的照明系统)非常重要。所提出的系统由三部分组成。最初,第一部分用于检测来自大脑皮层的 EEG 信号。第二部分是我们研究的核心,它代表一个网关,接收检测到的 EEG 信号,对其进行分析,生成适当的 KNX 命令,并将这些命令发送到所提出的系统的最后部分;它是使用 KNX 协议实现的照明系统 (LS)。

πlight:用于资源有限的流量信号控制
深度加固学习(DRL)的最新进步显着提高了适应性交通信号控制(TSC)的性能。但是,DRL策略通常由神经网络表示,这些神经网络是过度参数化的黑框模型。因此,学识渊博的政策通常缺乏解释性,由于资源构成而无法直接部署在现实世界中的硬件中。此外,DRL方法经常表现出限制性的概括性能,努力将学习的政策推广到其他地理区域。这些因素限制了基于学习的方法的实际应用。为了解决这些问题,我们建议使用一个可以继承的可解释程序来表示控制策略。我们提出了一种新的方法,即用于交通信号控制(π-light)的可策划增强学习,旨在自主发现非差异性的程序。具体来说,我们为构建程序定义了特定域的语言(DSL)和转换规则,并利用蒙特卡洛树搜索(MCT)在离散空间中找到最佳程序。广泛的实验表明,我们的方法始终超过基本线方法。此外,与DRL相比,π灯具有优越的通用能力,从而使跨不同城市的交叉点培训和评估。最后,我们分析了学到的计划政策如何直接在资源极有限的边缘设备上删除。

通过AI:可靠的深入加固学习,用于交通信号控制
代理商的输入包括在先前时间段记录的车辆计数和平均速度,以及当前交通信号灯计划中阶段之间的绿时间分布。代理从预定义的列表中选择一个交通灯程序,每个程序仅在周期长度和绿色时间分布方面变化。此动作空间设计反映了现实世界中的交集管理约束。奖励功能,对于指导代理商的性能至关重要,使用负累积的等待时间作为反馈。这确保代理人不会优先考虑一种方法,而不是另一种方法。为了训练代理商,我们采用了良好的深入增强学习方法,深Q网络(DQN),并与Epsilon-Greedy Exploration策略结合使用。
深入加固Q学习,用于智能交通信号控制,部分检测
摘要 - 智能传统信号控制器,将DQN算法应用于传递光策略优化,通过将TRAF-Fimfimals调整到实时交通状态,可以充分地减少交通拥堵。文献中的大多数命题都认为,检测到十字路口的所有车辆都是不现实的情况。最近,新的无线通信技术已通过基础设施对连接的车辆进行了成本范围的检测。只有当前配备的总量的一小部分,可以在低检测率下执行的方法。在本文中,我们提出了一个深钢筋Q学习模型,以优化孤立的交叉点,在具有连接车辆的部分可观察到的环境中。首先,我们在RL框架中介绍了新颖的DQN模型。我们为部分可观察到的环境引入了新的状态表示形式,并为传播信号控制提供了新的奖励功能,并提供网络体系结构和调整的超参数。第二,我们以两个步骤在多种情况下在数值模拟中评估模型的性能。首先完全检测到现有的驱动控制器,然后部分分解,并与互联车辆比例的损失估计值进行部分分解。最后,从获得的结果中,我们定义了可接受和最佳性能水平的检测率。该模型的源代码实现可在以下网址获得:https://github.com/romainducrocq/dqn-itscwpd

深度学习用于生物信号控制:从基础方法到实时方法的见解及建议
摘要 目的。生物信号控制是一种交互方式,它允许用户通过解码来自用户动作或思想的生物信号来与电子设备交互。这种与设备的交互方式可以增强用户的自主感,使瘫痪患者能够与日常设备进行交互,而这些设备对他们来说本来很难使用。它还可以通过使交互感觉更自然、更直观来改善对假肢和外骨骼的控制。然而,在目前的技术水平下,仍有几个问题需要解决,以便可靠地从生物信号中解码用户意图,并提供比其他交互方式更好的用户体验。一种解决方案是利用深度学习 (DL) 方法的进步来提供更可靠的解码,但代价是增加计算复杂性。本范围综述介绍了 DL 的基本概念,并帮助读者将 DL 方法部署到应在现实条件下运行的实时控制系统中。方法。本综述的范围涵盖任何电子设备,但重点是机器人设备,因为这是生物信号控制中最活跃的研究领域。我们回顾了与实施和评估包含 DL 的控制系统有关的文献,以确定该领域的主要差距和问题,并制定了如何缓解这些问题的建议。主要结果。结果强调了使用 DL 方法进行生物信号控制的主要挑战。此外,我们还能够制定指南,指导如何在生物信号控制系统中使用 DL 来设计、实施和评估研究原型。意义。这篇评论应该可以帮助刚接触生物信号控制和 DL 领域的研究人员成功部署完整的生物信号控制系统。各自领域的专家可以使用本文来确定可能的研究途径,以进一步推动使用 DL 方法进行生物信号控制的发展。
技术数据表 SF24A-SR - xref.be
操作模式 执行器由 DC 0 ... 10 V 标准信号控制,并将阻尼器移动到工作位置,同时拉紧回位弹簧。如果电源电压中断,阻尼器会通过弹簧力返回到紧急位置。
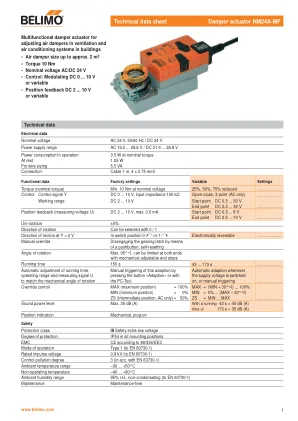
风门执行器 NM24A-MF 技术数据表
操作模式 执行器由 DC 0 ... 10 V 标准调制信号控制,并移动到控制信号定义的位置。测量电压 U 用于阻尼器位置 0 ... 100% 的电气显示,并作为其他执行器的从属控制信号。

风门执行器 GM24A-MF 技术数据表
操作模式 执行器由 DC 0 ... 10 V 的标准调制信号控制,并移动到控制信号定义的位置。测量电压 U 用于阻尼器位置 0 ... 100% 的电气显示,并作为其他执行器的从属控制信号。