XiaoMi-AI文件搜索系统
World File Search System信号输入

Millimar-Thread Check Inc.
• 基本单元中可安装 4 个输入模块 提供以下模块: – 4 个电感式探头输入(兼容 Mahr、Tesa、Marposs 或 Federal 探头) – 2 个增量式探头输入 – 1 个气动测量设备输入 – 4 个直流电压信号输入 • RS232 接口 • 模拟输出 • 6 个数字输入用于启动测量、主测量/零点设置、发送数据 • 12 个数字输出,最多可容纳 4 种特性:接受 - 拒绝 - 返工分类、集体接受/拒绝、测量时间、10 个等级、BCD 接口、超出警告限值 - 超出公差
Millimar-线程检查公司
• 基本单元中可安装 4 个输入模块 提供以下模块: – 4 个电感式探头输入(兼容 Mahr、Tesa、Marposs 或 Federal 探头) – 2 个增量式探头输入 – 1 个气动测量设备输入 – 4 个直流电压信号输入 • RS232 接口 • 模拟输出 • 6 个数字输入用于启动测量、主测量/零点设置、发送数据 • 12 个数字输出,最多可容纳 4 种特性:接受 - 拒绝 - 返工分类、集体接受/拒绝、测量时间、10 个等级、BCD 接口、合格 - 超出警告限值 - 超出公差

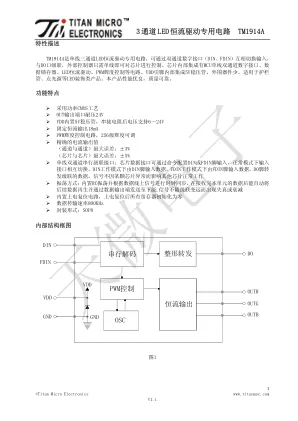
3通道LED恒流驱动专用电路TM1914A
功能说明 1、模式设置 本芯片为单线双通道通讯,采用归一码的方式发送信号。芯片接收显示数据前需要配置正确的工作 模式,选择接收显示数据的方式。模式设置命令共48bit,其中前24bit为命令码,后24bit为检验反码, 芯片复位开始接收数据,模式设置命令共有如下3种: (1)0xFFFFFF_000000命令: 芯片配置为正常工作模式。在此模式下,首次默认DIN接收显示数据,芯片检测到该端口有信号输 入则一直保持该端口接收,如果超过300ms未接收到数据,则切换到FDIN接收显示数据,芯片检测到该 端口有信号输入则一直保持该端口接收,如果超过300ms未接收到数据,则再次切换到DIN接收显示数据。 DIN和FDIN依此循环切换,接收显示数据。 (2)0xFFFFFA_000005命令: 芯片配置为DIN工作模式。在此模式下,芯片只接收DIN端输入的显示数据,FDIN端数据无效。 (3)0xFFFFF5_00000A命令: 芯片配置为FDIN工作模式。在此模式下,芯片只接收FDIN端输入的显示数据,DIN端数据无效。 2、显示数据
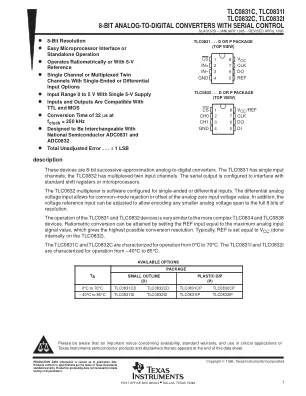
具有串行控制的 8 位模拟数字转换器数据表 (Rev. B)
TLC0831 和 TLC0832 使用采样数据比较器结构,通过逐次逼近程序转换差分模拟输入。要转换的输入电压施加到输入端并与地(单端)或相邻输入(差分)进行比较。TLC0832 输入端可以分配正 (+) 或负 (-) 极性。TLC0831 仅包含一个具有固定极性分配的差分输入通道;因此它不需要寻址。信号可以在 IN+ 和 IN- 之间以差分方式施加到 TLC0831,也可以施加到 IN+,IN- 接地作为单端输入。当施加到指定正端的信号输入小于负端上的信号时,转换器输出全为零。
亮度传感范围延迟预测变量
摘要 - 本文的特征是针对检测前亮度的负组延迟(NGD)预测指标的原始应用。低通(LP)型NGD预测理论是基于时间预期考虑建立的。制定了预期预测性能功能的分析设计条件。通过使用坡道信号输入来研究和研究LP-NGD预测变量。通过具有不同的上升/下降时间和任意波形信号的梯形测试信号来验证LP-NGD数字预测器具有STM32®微控制器实现的有效性。此外,通过使用NLS-4942亮度光电师提供了实际应用的出色测试结果。LP-NGD预测演示器的设计和实现了不同的时间累积(-30 ms,-50 ms和-70 ms)。计算出的和实验的结果良好一致性显示出负偏斜的瞬态响应。NGD预测变量对于物体检测,汽车安全性和智能建筑舒适性控制系统,对工业应用可能有用。

用于...的高频传感器数据采集系统 (SDAC)
本文介绍了一种用于中小型无人机 (UAV) 飞行控制和气动数据收集研究的高频传感器数据采集系统 (SDAC)。该系统重量轻、功耗低,工作频率为 100 Hz,具有以下特点:高频、高分辨率六自由度 (6-DOF) 惯性测量单元 (IMU),配有全球定位系统 (GPS) 接收器、3 轴磁力计、皮托管、七个 10 位模数转换器 (ADC)、十六个 12 位模数转换器、一个 14 位模数转换器、二十个数字输入/输出 (I/O)、八个脉冲宽度调制 (PWM) 信号输入、一个 40 英里下行链路收发器、一个开放串行端口和一个开放 CANbus 端口,以及高达 64 GB 的板载存储。数据采集系统完全由商用现货 (COTS) 组件制成,从而降低了系统成本和实施时间。SDAC 将各种传感器流组合成统一的高保真状态数据流,该数据流被记录下来以供以后进行空气动力学分析,并同时转发到单独的处理单元,例如自动驾驶仪。
图像预处理的范德华异质结构中的可调阴性和阳性光电导率
视觉信息的处理主要发生在视网膜中,视网膜预处理功能极大地提高了视觉信息的传输质量和效率。人工视网膜系统为有效的图像处理提供了有希望的途径。在这里,提出了石墨烯/ INSE/ H -BN的异质结构,该结构通过改变单个波长激光器的强度,表现出负和正照相(NPC和PPC)效应。此外,基于激光的功率依赖性光导不传导效应:I pH = -mp𝜶1 + 1 + NP 𝜶2,提出了一个修改的理论模型,该模型可以揭示负/阳性光导能效应的内部物理机制。当前的2D结构设计允许晶体管(FET)表现出出色的光电性能(R NPC = 1.1×10 4 AW - 1,R PPC = 13 AW - 1)和性能稳定性。,基于阴性和阳性光电传感效应成功模拟了视网膜预处理过程。此外,脉冲信号输入将设备的响应性提高了167%,并且可以提高视觉信号的传输质量和效率。这项工作为构建人工视觉的建设提供了一个新的设计思想和方向,并为下一代光电设备的整合奠定了基础。

ADV7181 多格式 SDTV 视频解码器数据手册 (Rev. B)
特性 多格式视频解码器支持 NTSC-(J、M、4.43)、PAL-(B/D/G/H/I/M/N)、SECAM 集成三个 54 MHz、9 位 ADC 由单个 27 MHz 晶振计时 线路锁定时钟兼容 (LLC) 自适应数字线路长度跟踪 (ADLLT™) 5 线自适应梳状滤波器 专有架构,用于锁定弱、嘈杂和不稳定的视频源,如 VCR 和调谐器 副载波频率锁定和状态信息输出 集成 AGC 和自适应峰值白模式 Macrovision® 版权保护检测 CTI(色度瞬态改善) DNR(数字降噪) 多种可编程模拟输入格式: CVBS(复合视频) S-Video (Y/C) YPrPb 分量(VESA、MII、SMPTE 和 Betacam) 6 个模拟视频输入通道 自动 NTSC/PAL/SECAM 识别 数字输出格式(8 位或 16 位): ITU-R BT.656 YCrCb 4:2:2 输出 + HS、VS 和 FIELD 0.5 V 至 1.6 V 模拟信号输入范围差分增益:0.6% 典型值

用于空间光通信的连续波单横模偏振...
随着空间数据流量的不断增加,空间光通信受到越来越多的关注,作为持续开发高速光学空间网络努力的一部分,尼康和JAXA一直在开发用于调制连续波信号的单横模10 W保偏Er/Yb共掺光纤(EYDF)放大器。我们已经完成了工程模型(EM)的开发,并计划在2024年作为国际空间站光通信系统的一部分演示该放大器。EM放大器具有三级反向泵浦结构,带有抗辐射的EYDF。它还包括泵浦激光二极管和功率监控光电二极管以避免寄生激光,这两者都已被证实具有足够的抗辐射能力,以及控制驱动电路。整体尺寸为300毫米×380毫米×76毫米,重6.3公斤。在标准温度和压力条件(STP:室温,1 个大气压)下,当信号输入为 -3 dBm 时,EM 放大器在总泵浦功率为 34 W 时实现了 10 W 的光输出功率。总电插效率达到 10.1%。在 STP 下,放大器在 10 W 下实现了 2000 小时的运行时间。我们进行了机械振动测试和工作热真空测试,以确保放大器作为太空组件的可靠性。在工作温度范围的上限和下限 ± 0 和 + 50 °C 下,输出功率和偏振消光比 (PER) 分别为 > 10 W 和 > 16 dB,而放大增益或 PER 没有任何下降。