XiaoMi-AI文件搜索系统
World File Search System像锁
MIL-STD-2131 - EverySpec
可维护性 ................................. 最大维护时间 ........................ 弹射器系统可维护性 ........................ 弹射器系统最大维护时间 .......... 维护计划 ................................. 组织维护 ........................ 组织维护任务 ........................ 中级维护 ........................ 中级维护任务 ........................ 工厂维护 ........................ 工厂维护任务 ........................ 互换性 ........................ 识别和标记 ........................ 回收、原始和再生材料 ........................ 详细要求 ................................. 导弹装载 ................................. 支援设备 ................................. 发射器结构 ................................. 发射器接口对准 ........................ 悬挂和释放系统 ................................. 闩锁机制设计 ................................. 独立自锁 ................................. 手动闩锁 ................................. 从属解锁 ................................. 释放机制 ................................. 手动释放 ................................. 机电安全联锁 ................................ 导弹传感 ................................. 保险系统 ................................. 防摇支架

沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。
Rad-Hard标准单元在28nM TSMC中设计
这些影响是由于单个粒子之间的相互作用(例如重离子)和硅。如果释放的能量(LET,线性能传递)足够高,则可能会破坏CMOS结构(SEL,单个事件闩锁)中的闩锁或可能会损坏栅极(SEGR,单个事件门破裂)。必须在28nm的过程中考虑缓解措施。
发行ETA,开发EADS:挑战和机遇的观点
rotho blaas锁连接器模块宽度[mm] k H,2 F 2,Alu,rk [kn]锁t 80 17,5 n m×2,19 n m×10锁t 17,5 n m×4,39 n m×4,39 n m×10 lock t 100floor t 100floor 210 n m×12,5 n m×12,5 n m×10 n m×10 5 n m×1 17,3 m×1 17,3 M×120 1 17,3 m×5,5×5×3 M×3 M×3 M×120 1 17,3 M×120 1 17,3 M×T T 120 1 17,3 M @ 25,0 n m×5,30 n m×15锁t 135楼300 n m×15,3 n m×240锁t 175 25,0 n m×10,0 n m×20 lock t 215 25,0 n m×17,2 n m×17,2 n m×20 n m×20 lock t 240 n0 n0 2 240 n m×2 22,22,22,22,22,7 n m×2 24 m m×2 24 m m×0 2 265,0×0 2 265,0×0 2 265,0×0 2 265,0×0 2 265,0×0 2 265,0×0 2 265,0×0×0 290 25,0 n m×36,0 n m×24 n m是基本模块的数量,请参见产品图

电子电动锁(适用版本)安装和用户手册BT/L-M ... v/z bt/b-g ... v/z
一般说明本手册旨在用于技术资格和训练有素的安装程序。mottura serrature di sicurezza s.p.a.感谢您选择此产品并提醒您: - 在安装此产品之前和进行任何维护之前,请仔细阅读这些说明。- 所有组装和连接程序必须遵循良好的实践程序,并遵守当前的法律和标准。- 不将此产品安装在爆炸室或气氛中,或者在炎症烟雾/气体的存在下。- 除非门受到充分保护,否则请勿将该产品安装在与水或大气剂接触风险的门上。- 关闭电源,并在对产品上进行任何安装或维护工作之前断开所有活零件。在执行本手册中描述的安装或维护程序时,采取所有可能的预防措施,以消除电击的风险。- 安装人员必须将这些说明和所有维护说明交付给用户。- 保留这些说明以备将来参考并附加销售收据以验证保修。- 仅在出现问题的情况下与授权经销商联系。mottura serrature di sicurezza s.p.a.可能会随时更改这些说明中描述的产品的特征,恕不另行通知。
沃尔沃宣传册 紧凑型轮式装载机 L30Bpro L35Bpro 英文版
传动装置:静液压传动装置,在负载下全动力换挡,无论是在改变方向(前进和后退)时还是在范围之间。在所有范围内均可实现最大牵引力。“英寸/制动踏板”用于可变机器速度控制,并在发动机转速恒定时将动力传输到铲斗液压系统。多功能杆用于改变方向、差速锁和使用伺服控制。车轴:由两个刚性门式车轴实现全轮驱动。差速锁:两个车轴均采用液压驱动的 100% 差速锁。车架:坚固的前后车架,机器人焊接。铰接式摆动接头可实现最佳机动性和牵引力。
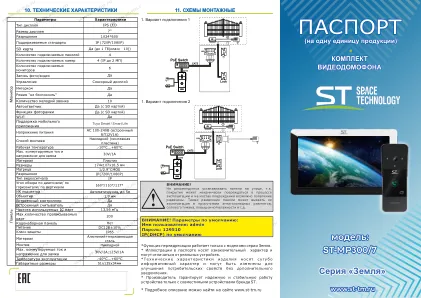
带图片护照 ON IP KIT ST-MP300.7 fonts.cdr
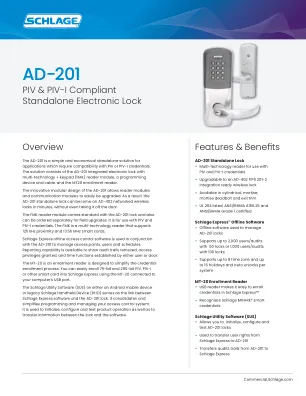
视频对讲监视器允许您与监视器屏幕上的访客可视化进行通信,随后可以远程开门。呼叫面板有一个内置彩色摄像机。面板上安装有一个继电器,用于控制执行器(机电或电磁锁)。该面板具有耐用的金属机身,涂有聚酯粉末涂料,可以在户外、盗窃和破坏风险较高的地方使用。前面板上有一个IC卡读卡器,仅供通行。当卡出现在读卡器上或者按下显示器上的按钮时,锁就会打开。面板有一个内置控制器,用于控制机电锁或电磁锁。该套件支持人脸识别功能。当识别出脸部时,锁会自动打开。
![arXiv:2210.00833v1 [cs.AR] 2022 年 10 月 3 日](/simg/b\b0d0b4c957de5d7ae82dc577c10f5b166450d54b.webp)
arXiv:2210.00833v1 [cs.AR] 2022 年 10 月 3 日
如今,对安全有要求的应用程序已无处不在,可在各种边缘设备中找到。然而,这些设备中的微控制器尽管通过实现多核和缓存层次结构提供了中等性能,但可能无法提供足够的支持来实施最高完整性级别所需的某些安全措施,比如锁步执行,以避免所谓的共因故障(即影响冗余组件的故障导致所有冗余组件出现相同的错误)。为了解决这一限制,最近在 [ 2 ] 中提出了一种基于软件监视器的方法,该方法在内核之间强制执行某种基于软件的锁步执行,并提供了概念证明。本文介绍了 SafeSoftDR,这是一个库,它提供了一个标准接口,用于在非原生锁步内核上部署基于软件的锁步执行,从而减轻了最终用户创建冗余进程、复制输入/输出数据和执行结果比较的负担。我们的库已经在基于 x86 的 Linux 上进行了测试,目前正在集成到针对安全相关应用的开源 RISC-V 平台上,从而为安全关键型应用提供了便捷的环境。