XiaoMi-AI文件搜索系统
World File Search System分解器


用于控制大型软执行器阵列的流体多路分解器
软机器人领域致力于创造大部分(如果不是全部)柔软的机器人。虽然软致动器和软传感器都取得了重大进展,但在软控制系统的开发方面所做的工作相对较少。这项研究提出了一种软微流体多路分解器作为软机器人的潜在控制系统。多路分解器只需几个输入即可控制许多输出,增加了软机器人的复杂性,同时最大限度地减少了对外部阀门和其他外部组件的依赖。这项研究中的多路分解器改进了早期的微流体多路分解器,输入减少了近两倍,这一设计特点简化了控制并提高了效率。此外,这项研究中的多路分解器旨在适应软机器人所需的高压力和流速。多路分解器的特征从单个阀门级别到完整的系统参数,其功能通过控制一系列可单独寻址的软致动器来展示。

利用图嵌入神经网络实现自适应布局分解
摘要 — 多重模式布局分解 (MPLD) 已被广泛研究,但到目前为止,还没有一个分解器在结果质量和效率方面胜过其他分解器。这一观察促使我们探索如何为给定的布局图自适应地选择最合适的 MPLD 策略,这是一个并非平凡且仍未解决的问题。在本文中,我们提出了一种基于图卷积网络的布局分解框架来获得布局的图嵌入。图嵌入用于图库构建、分解器选择、图匹配、针迹去除预测和图着色。此外,我们设计了一种纯粹依赖于消息传递图神经网络的快速非针迹布局分解算法。实验结果表明,与快速但非最优的启发式方法相比,我们基于图嵌入的框架可以在广泛使用的基准中实现最佳分解,并且运行时间显着下降。


用图嵌入神经网络的自适应布局分解
摘要 - 已广泛研究了多个图案布局分解(MPLD),但是到目前为止,还没有在结果质量和效率方面主导其他人的分解器。这种观察促使我们探索如何适应为给定布局图的最合适的MPLD策略,这是无聊的,仍然是一个空旷的问题。在本文中,我们提出了一个基于图形卷积网络的布局分解框架,以获取布局的图嵌入。图形嵌入式用于图库构造,分解器选择,图形匹配,针迹去除预测和图形着色。此外,我们设计了一种纯粹取决于传递图形神经网络的快速非针迹布局分解算法。实验结果表明,我们基于图的嵌入式框架可以在广泛使用的基准测试中实现最佳分解,即使与快速但非最佳的启发式方法相比,运行时也可以下降。


DNA/DNR-AI-255
输入通道数:2 配置:可通过软件选择同步机(3 线)或旋转变压器(4 线) 分辨率:16 位 精度:± 2.6 角分 频率:50 Hz 至 4.0 kHz 信号输入:2-28 Vrms. 输入阻抗:478 kΩ ±10 kΩ 加速度:300 rps/s @ 60 Hz, 450 rps/s @ 400 Hz 1000 rps/s @ 4000 Hz 阶跃响应:800 mS - 179° @ 60 Hz, 150 mS - 179° @ 2500 Hz 更新率:最大更新率等于激励频率。参考输出通道数:2(每个输入通道一个)输出电压:28 Vrms,最高 1.2 VA。电压分辨率 1.2 mVrms 参考频率 50 Hz 至 4 kHz (+/-1%) 同步器/分解器输出通道数 2(同步器/分解器输入和模拟输出的总数限制为 2。)配置同步器(3 线)或分解器(4 线)分辨率 16 位输出电压 28 Vrms 高达 1.2 VA。输出精度 ±4 弧分 通用规格 工作温度 经测试 -40 °C 至 +85 °C(在非 GigE Cubes 中,如果工作温度高于 60 °C,则需要 DNA-FAN。) 振动 IEC 60068-2-6 IEC 60068-2-64 5 g,10-500 Hz,正弦波 5 g(rms),10-500 Hz,宽带随机 冲击 IEC 60068-2-27 100 g,3 ms 半正弦波,6 个方向 18 次冲击 30 g,11 ms 半正弦波,6 个方向 18 次冲击 湿度 5 至 95%,无凝结 海拔 120,000 英尺 MTBF 275,000 小时 功耗 空闲时 4.5 瓦,满载时最高 10 瓦 订购 指导

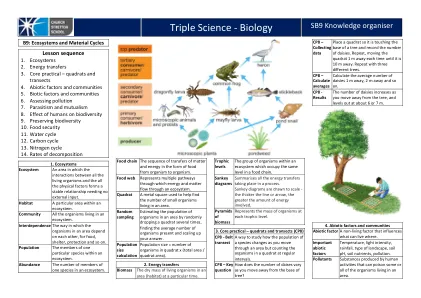
三重科学 - 生物学
降低温度,降低水含量,辐射,还原氧。辐照物体暴露于辐射的过程。辐照被起诉杀死分解器。堆肥腐烂的植物和蔬菜废物的混合物,这些植物和蔬菜废物被添加到土壤中以帮助植物生长。土壤生育能够维持农业植物生长的能力,即提供植物栖息地,并产生持续和一致的高质量产量。通过细菌,真菌或其他生物的作用衰减有机物的分解或腐烂。分解速率

有机废物的堆肥过程
I.引言废物是任何现代社会效率低下的象征,也是未分配资源的代表。1个有机废物,例如,MSW主要是由房屋持有,工业和公共服务生成的。通过增加人口,行业和公共服务来增加MSW的数量。垃圾填埋场中的有机废物处置已引发了各种环境问题,例如温室气体排放和渗滤液。2未经处理的有机废物沉水池在土壤上,排放到治疗环境或人类健康的土地,水或空气中。3,4土壤污染是将一种或多种化学,物理和生物学物体进入土壤的条件,它们会破坏土壤结构并使植物难以适应。环境废物将被正确食用废物的生物清理。分解剂在通过生态系统的能量流中起关键作用。它们将死亡的生物分解成简单的无机材料,从而使主要生产者可以使用营养。在活土壤中,各种生物(微生物和动物群)在生命中进行各种活动。分解过程和原始有机材料的分解过程以完成堆肥,而分解剂分解了死者,有机材料,碎屑(如千足虫,earth,earth,termites) - 食用死有机体废物。死植物材料,例如叶子和木材,动物尸体和粪便。他们作为地球的清理工作人员执行有价值的服务。没有分解剂,死树,死昆虫和死动物将堆积在各处。更重要的是,分解器使生态系统的主要生产商(通常是植物和藻类)可以使用重要的营养。分解器将复杂的有机材料分解为更多的基本物质,水和二氧化碳,以及含有氮,磷和钙的简单化合物。所有这些成分都是植物需要生长的物质。5一些分解剂是专门的,只分解了某种死者。其他是以许多不同材料为食的通才。分解器将养分返回到土壤或水中,生产者可以使用它们生长和繁殖。6大多数分解剂是微观生物,包括原生动物和细菌。其他分解器足够大,可以看到没有显微镜。它们包括真菌以及无脊椎动物有时称为letritivores,其中包括earth,白蚁和千足虫。分解过程,原始有机材料对成品堆肥的分解。自从生命首次出现在