XiaoMi-AI文件搜索系统
World File Search System刹车灯
白炽灯和 LED 刹车灯:反应时间的新颖分析
摘要 在英国,追尾碰撞占所有车辆事故的 8% 左右,而未注意到或对刹车灯信号做出反应是主要原因。同时,车辆上传统的白炽刹车灯正越来越多地被大量采用 LED 的设计所取代。在本文中,我们使用一种新方法在模拟环境中使用物理刹车灯组件记录受试者的反应时间来研究刹车灯设计的有效性。测量了 22 名受试者对 10 对 LED 和白炽灯刹车灯的反应时间。为每个受试者调查了三个事件,即刹车灯亮到油门松开的延迟时间(BrakeAcc)、油门松开到刹车踏板踩下的延迟时间(AccPdl)以及从灯亮到刹车踏板踩下的累积时间(BrakePdl)。据我们所知,这是第一项将反应时间分为 BrakeAcc 和 AccPdl 的研究。结果表明,与八个测试的 LED 灯相比,两个装有白炽灯泡的刹车灯导致反应时间明显变慢。BrakeAcc 结果还显示,经验丰富的受试者通过松开油门踏板对刹车灯的激活做出反应更快。有趣的是,分析还显示,刹车灯的类型会影响 AccPdl 时间,尽管经验丰富的受试者并不总是比没有经验的受试者反应更快。总体而言,研究发现,不同设计的刹车灯会显著影响驾驶员的反应时间。

Bike.ai——Bernard Chen
受 Neal (GSI) 的刹车检测系统理念的启发,我们的项目包括了其他功能,以提高骑手的安全性和体验。当系统检测到明显减速(表示需要刹车)时,刹车灯 LED 灯带将亮起。左、右转向信号指示灯也可以通过无线 BLE 按钮激活,并在转弯或超时时自动关闭。此外,我们的系统通过两个超声波传感器实现近距离检测,当在可配置距离内检测到物体时,它们会激活车把上的近距离指示灯 LED。我们更进一步强调了系统的非侵入性,并通过 iOS 应用程序提供可定制性。我们将系统设计为非侵入式,因此我们选择不使用霍尔效应传感器,因为霍尔效应传感器需要用户测量自行车的车轮并需要大量接线。iOS 应用程序允许用户无线配置和自定义刹车检测模式、近距离感应距离、转向信号颜色和刹车灯颜色。
PCA驾驶员的ED技术检查表
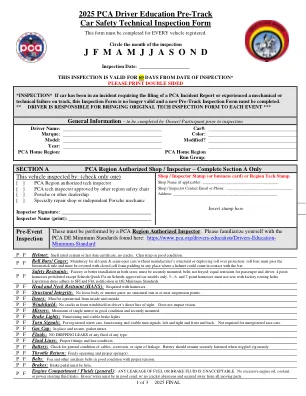
安全约束:在两个座位上的工厂或更好的安装;必须牢固地安装;皮带没有磨损;乘客和驾驶员的同等限制。4点线束禁止,除了Schroth快速拟合Schroth批准的汽车型号外。5-,6和7点安全带必须使用带有工厂路由孔的座椅。到期日期遵守最低标准的SFI和FIA通知。p F头和颈部约束(汉斯):安全带。p f结构完整性:没有松动的身体或内部零件;在悬架点或附近没有结构性生锈。p f门:必须从内部和外部运行。p f挡风玻璃:驾驶员直接视线的前挡风玻璃上没有裂缝。不会损害视力。p f镜子:最少状态良好并牢固地安装的单镜。p f刹车灯:功能且可见的刹车灯。p f转向信号:对于注册的街车,运行和可见的转弯信号,左右前后。未注册的赛车不需要。p f气盖:到位并固定,垫圈完整。p f流体:任何类型的流体均无滴水。p f流体线:适当的配件和线路状况。P F电池:检查电缆,腐蚀或泄漏迹象的一般状况。剧烈摇摆时,电池应保持牢固固定。p f油门返回:自由操作和适当的弹簧。p f皮带:风扇和其他辅助皮带,状况良好,张力良好。p f刹车:制动踏板必须坚固。

为车辆配备新颖的EHMIS可能会改变...
摘要 - 在过去的几年中,人们一直在讨论(自动化的)车辆是否应配备新型的外部人机互动(EHMIS),以促进与附近脆弱的道路使用者的沟通。这项探索性研究调查了将配备EHMI的车辆引入公共交通是否可能影响行人在没有EHMI的情况下与车辆互动的方式。为了达到这个目标,我们的参与者指定了他们愿意在基于视频的实验中越过配备额叶刹车灯EHMI的车辆前越过。组之间,模拟流量中配备EHMI的车辆的配额各不相同。我们的发现表明,带有EHMI的车辆的配额确实影响了街头越野的意愿以及没有EHMI的非收益车辆。值得注意的是,效果的大小和方向取决于车辆和行人之间的距离。对EHMIS的未来研究应考虑EHMIS潜在的意外副作用。

安全性 可靠性 生产力 - 小松澳大利亚
• 空调/加热器除霜器(过滤和加压) • 气罐放气系统 • 可调节自动提升高度切断 • 自动铲斗调平控制 • 倒车声音警报 • 电池断开开关 • 提升臂和铰接锁 • 刹车灯 • 中央服务 • 数据分析和查看软件 • 数据记录 - 可下载的生产和维护日志 • 驾驶室门联锁 • 带牵引点的牵引杆 • 电喇叭 • 紧急停止按钮(驾驶室和遥控器安装) • 灭火器,手动,20 磅(9.07 千克) • FOPS - 落物保护系统 • 怠速计时器 • 内部灯 • 隔离监视器 • 操纵杆提升和铲斗控制 • 操纵杆转向控制 • 跳跃启动 • 紧急转向 • LED 工作灯 • LINCS II 警报 • LINCS II 负载称重和监控 • 操作员座椅(11 向可调) • 超速警报 • 停车制动器 • 可伸缩四点式肩带 • ROPS - 翻滚保护结构 • 可选油门开关 • 起动器断开开关 • 安全玻璃整个驾驶室 • 转向信号 • 驾驶室内 12VDC 电源 • 12VDC 电源端口 (2) • 挡风玻璃清洗器储液罐 9.8 L • 挡风玻璃雨刷和清洗器(所有驾驶室玻璃) • 自动润滑系统 • 手册:操作员、零件(Link One)、维护和维修 • 动能存储系统 (KESS) • 集成底部保护系统 • 颜色编码和标签的起重点
DD 表格 1800,“移动房屋检查记录”
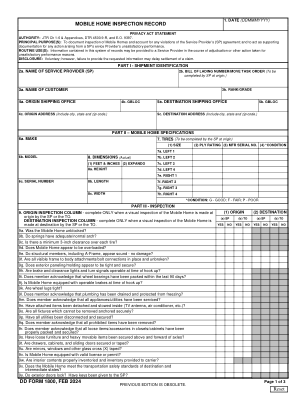
9a. 移动房屋是否畅通无阻?9b. 弹簧是否具有足够/正常的拱度?9c. 每个轮胎之间是否至少有 3 英寸的间隙?9d. 移动房屋是否超载?9e. 结构构件(包括 A 型框架)是否完好无损?9f. 所有可见的车架到车身附件/螺栓连接是否到位且完好无损?9g. 外部镶板/装饰条是否紧固牢固?9h. 连接时刹车灯、间隙灯和转向灯是否可操作?9i. 会员是否确认车轮轴承已在过去 90 天内包装好?9j. 连接时移动房屋是否配备了可操作的刹车?9k. 车轮螺母是否紧固?9l. 会员是否确认管道已排干并防止结冰?9m. 会员是否确认所有电器/公用设施都已维修?9n.是否已将附属物品拆下并存放在内部(电视天线、空调等)?9o. 所有无法拆除的固定装置是否已牢固固定?9p. 所有公用设施是否已断开连接并固定?9q. 会员是否确认已拆除所有违禁物品?9r. 会员是否确认已正确包装并固定壁橱/橱柜中的所有松散物品/配件?9s. 是否已将松散家具和重型可移动物品固定在车轴上方和前方?9t. 抽屉、橱柜和滑动门是否已固定或用胶带粘贴?9u. 镜子、窗户和其他玻璃是否已用十字 (X) 胶带粘贴?9v. 移动房屋是否配备有效的执照或许可证?9w. 是否正确清点内部内容并向承运人提供清单?9x. 移动房屋是否符合目的地和中间州的运输安全标准?9y. 外门是否锁好?是否已将钥匙交给 SP?
![arxiv:2208.01582v3 [CS.CV] 2023年6月19日](/simg/8\81d9c6fdbb81024376d5297f0c946c4017919ecf.webp)
arxiv:2208.01582v3 [CS.CV] 2023年6月19日
安全。感知和预测是现有的自主驾驶软件管道中的两个单独的模块,其中它们之间的接口通常被定义为手工挑选的几何和语义特征,例如历史代理轨迹,代理类型,代理人大小等。这样的接口导致可以在轨迹预测中使用的有用感知信息的丢失。例如,尾灯和刹车灯指示了车辆的意图,行人的头姿势和身体姿势告诉他们他们的注意力。此信息(如果未明确建模)在外部管道中被忽略。此外,随着感知和预测的分离,累积错误,无法在以后的阶段缓解。具体而言,轨迹预测因子使用的历史轨迹来自上游的pepleption模块,该模块不可避免地包含错误,从而导致预测性能下降。设计一个对上游输出误差可靠的trajectory预测变量是一个非平凡的任务[61]。最近的作品,例如Intentnet [3],FAF [35],PNPNET [31]提出了基于LIDAR的轨迹预测的端到端模型。他们遭受了几个限制:(1)他们无法利用相机中丰富的细粒度视觉信息; (2)这些模型使用卷积特征图作为其内部和跨框架内部的中间反复限制,因此遭受了多种可差异操作,例如在多对象跟踪中的对象解码中的非最大最大弹药和对象关联。总而言之,本文的贡献是三倍:1。为了应对所有这些挑战,我们提出了一条新型的管道,该管道利用以查询为中心的模型设计来预先轨迹,称为VIP3D(VI Sual Sual轨迹P缩减3D代理查询)。VIP3D消耗了来自周围摄像机和高清图的多视频视频,并以端到端和简洁的流方式使代理级级的未来轨迹预测,如图1所示。具体来说,VIP3D将3D代理查询作为整个管道的接口,每个查询都可以映射到(最多最多)环境中的代理。在每个时间步骤中,查询来自多视图图像的汇总视觉特征,学习代理的时间动力学,对代理之间的关系建模,并最终为每个代理产生可能的未来传播。在整个时间内,3D代理查询都在存储库中维护,该查询库可以初始化,更新和丢弃以跟踪环境中的代理。此外,与以前的预测方法不同,VIP3D仅使用先前的时间戳和当前时间戳的传感器特征的3D代理查询,这些预测方法是使用历史框架的历史轨迹和特征地图,从而使其成为简洁的流媒体方法。vip3d是第一种完全可区分的基于视力的方法,可以预测拟驱动器的未来轨迹。而不是使用手工挑选的fea-