XiaoMi-AI文件搜索系统
World File Search System动器

空调设备功能恢复工程
对于将来的行政程序,您将需要提交和接收以下文件:此外,自2021年度起,若有希望实施建设工程的人士提出请求,部分行政手续将可通过电子邮件办理。若有此意愿,请在提交补助金申请前告知国家政府或国家政府委托的人员。对于通过电子邮件办理的行政手续,在填写完各种文件上的必要信息后,需要自行将其转换为PDF格式,然后通过电子邮件发送。因此,需要有可以将文件转换为PDF的设备(例如扫描仪)。

空调设备功能恢复工程
(1)登记事项证明书或者住所证明书 (2)驾驶执照等的复印件(属于第4项的情况除外) (3)证明建设申请人是社会保护法第6条第1项规定的保护对象或者促进留在中国等的日本人顺利回国及支援留在中国等的日本人及其特定配偶永久回国自立的法律第14条规定的抚养给付对象(以下称为“保护对象等”)的文件(仅当建设申请人是保护对象等时才附加)

人工智能医疗设备的现状和未来
任何仪器、设备、器具、软件、材料或其他物品,无论是单独使用还是组合使用,连同任何附件,包括制造商旨在专门用于诊断和/或治疗目的的软件,以及其正确应用所必需的软件,制造商旨在用于人类的以下目的: — 疾病的诊断、预防、监测、治疗或缓解, — 伤害或残疾的诊断、监测、治疗、缓解或补偿, — 解剖或生理过程的研究、更换或修改, — 受孕的控制,并且其在人体内或人体上的主要预期作用不是通过药理学、免疫学或代谢手段实现,但可以通过此类手段辅助其发挥作用

GM50301
概述 GM50301 是一款 2.5GHz 、 10 路输出差分扇出缓冲 器,用于高频、低抖动时钟 / 数据分配和电平转换。输 入时钟可以从两个通用输入或一个晶体输入中选择。 所选定的输入时钟被分配到三组输出,两组包含 5 个 差分的输出和 1 个 LVCMOS 输出。两个差分输出 组均可被独立配置为 LVPECL 、 LVDS 或 HCSL 驱 动器,或者被禁用。 LVCMOS 输出具有用于在启用 或禁用时实现无短脉冲运行的同步使能输入。 GM50301 采用一个 3.3V 内核电源和 3 个独立的 3.3V 或 2.5V 输出电源供电。 GM50301 具有高性能、高功效而且用途广泛,使其 成为替代固定输出缓冲器器件的理想选择,同时增加 系统中的时序裕度。 GM50301 在内核和输出电源域之间没有电源时序要 求。 功能框图
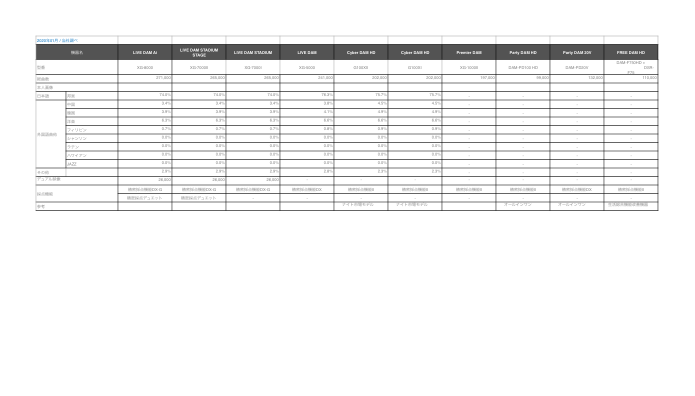
2020 年 1 月 / 根据我们的研究,设备名称为 LIVE DAM Ai...
舞台现场 DAM 体育场现场 DAM Cyber DAM HD Cyber DAM HD 首映 DAM 派对 DAM HD 派对 DAM 20V 免费 DAM HD


动作图
我们作为社区大学受托人必须练习和证明的领导类型与生成AI基于聊天的界面一样复杂:基于获得的知识和高级推理能力的结合,输出背后是无数计算。人工智能现在是如此无所不在,如此令人生畏,以至于理解我们值得我们反思智力本身的本质是值得的。智能是“学习,理解或处理新的或尝试的情况的能力”,“熟练使用理性”或“应用知识来操纵环境或通过客观标准(例如测试)衡量的知识的能力”,根据Merriam-Webster Dictionary的说法。除了定义,智力的概念是一个复杂的概念 - 当我们努力以智能管理我们的大学时,要牢记的事情。任何新手董事会服务的人都知道,一个人的学习和理解能力都会受到无数因素的测试 - 大学系统的动态,议会程序的动态,存在的政策以及制定政策的制定,甚至是基本角色,责任,责任以及董事会首席执行官的局限性。处理新的和尝试的情况?董事会服务在这方面永远不会挑战我们。我们获得并组装所有这些知识后,我们必须熟练,明智地运用我们的理由。我们必须能够评估,例如,政策和领导决定的合理政策和领导决定程度,多少
空调设备维修及检测服务(通讯站)
(8)其他 a. 如果需要重新投标,将立即进行。但是,如果通过邮寄投标,则投标将于 2024 年 7 月 31 日星期三下午 1:15 执行。 (一)邮寄投标:将投标表放入写有标题的小信封内并密封。然后将此表和资格审查结果通知书副本放入标有“(投标标题)附有投标表”的信封内,并通过挂号信(简单挂号信也可以)于 2024 年 7 月 25 日星期五下午 5 点之前寄送至第 324 会计中队承包团队。在这种情况下,请拨打下面列出的人员以确认消息已到达。 如需重新投标,投标必须于 2024 年 7 月 30 日星期二中午之前到达第 324 会计中队承包团队。 双方当事人签字、盖章即为合同成立。但中标人收到通知后,可不再签订合同。 如果您代表他人竞标,则必须提交授权委托书。 有关招标的询问:1016 Shukuume,Chitose,Hokkaido,066-8577,日本地面自卫队,Higashi Chitose Garrison,第324会计单位,合同部分(联系:Kobori:Kobori:Kobori)日本的Higashi chitose Garrison地面自卫力量(联系:KIDO),电话:0123-23-5131(分机3324)(9)公告的地点和期间发布:(a)发布的地点:(a)Higashi-Chitose,Higashi-Chitose,Sapporo,Sapporo和Shimamamatsu Garrison Carking tobles tobles toble toble norder corment B. ,2024年7月12日 - 2024年7月26日,星期五

Promega 2025-2026设备目录
尺寸(W X H X D)37.3 cm x 47.7 cm x 53.3 cm重量28 kg电源(功率消耗)100-240 V AC,50/60 Hz样品容器幻灯片,微型室,35毫米,35毫米,6,12,24,24,24,24,24,96 75 NA,1毫米WD系统放大倍率10.3x传感器和像素尺寸CMOS,7百万像素,冷却温度-25°C,低噪声,量子效率70%以上,像素尺寸:4.5 µm x 4.5 µm,最大曝光时间为60分钟的像素大小:2200×2200像素,4.5 µm x 4.5 µm像素像素大小最大视野:1.4 mm x 0.95 mm x 0.95 mm分辨率限制环境控制功能选项:舞台顶室,混合气体控制器