XiaoMi-AI文件搜索系统
World File Search System包络线
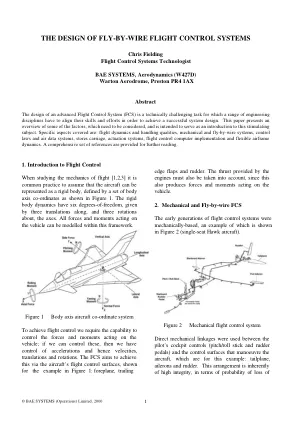
电传飞行控制系统的设计
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。
电传飞行控制系统的设计
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。

CITATION CJ3+ - 赛斯纳
借助 Garmin G3000 航空电子设备套件的强大功能,您可以减少管理驾驶舱的时间,而花更多的时间享受飞行。驾驶舱空间更大,更适合飞行员,符合人体工程学,您可以舒适高效地飞行,直观的触摸屏控制让您只需一瞥即可获得所有重要信息。可选的增强视觉系统 (EVS) 可让您更好地了解即将到来的天气、雾等,而驾驶舱的技术可让您在最大程度上减少干扰,从而提高对所有操作的了解。全数字双通道 Garmin 飞行控制系统带来的不仅仅是自动驾驶仪。它提供冗余和可靠性,同时优化整个空速包络线的性能。
D1.1 最新技术回顾 - Harvis 项目
图表列表 图 1。Thalès 下一代驾驶舱 © Thalès ........................................................................................... 16 图 2。驾驶任务分析 [16]。...................................................................................................... 24 图 3。SPO 操作条件分类 [23]。............................................................................. 24 图 4。AOC 的代表性布局 [23]。............................................................................................. 26 图 5。地面操作员单元结构示例 [23]。............................................................................. 27 图 6:随着时间的推移,ATC 和驾驶舱中的综合自动化支持不断增强。........ 34 图 7:Sheridan 和 Verplanck 提出的决策和行动选择自动化水平..................................................................................... 35 图 8:Parasuraman 等人提出的自动化类型和水平模型。........................................................................................... 35 图 9:LOAT(来自 dblue.it/projects/project-levels-automation-taxonomy) ............................................................................. 37 图 10:未来天空安全项目正在为飞行员考虑的 HP 包络线 ............................................................................. 44 图 11:人类表现包络线概念示例 .................................................................................................... 47 图 12。不同领域中 AI 任务的图形视图。改编自麦金斯基全球研究所的笔记 [143]。........................................................................................................................................... 56 图 13。不同人机性能评估技术之间的相互作用 [16]。..... 66 图 14。飞行指引仪 ............................................................................................................................. 68 图 15。飞行管理系统 ............................................................................................................. 69 图 16。TCAS 交通警报和解决建议 ............................................................................................. 69 图 17:[279] 中自适应 HMI 的总体布局。............................................................................................. 71 图 18。认知 HMI 架构 [16]。............................................................................................. 72 图 19。VPA 系统架构 [16]。........... 75 图 21................................................................................................. 74 图 20。指挥、控制和通信 (C3) 链路 VPA 系统架构 [16]。SPO 通信网络 [16]。.................................................................................... 75 图 22。监视子系统架构 [16]...................................................................................... 77 图 23。NG-FMS 架构 [16]。.................................................................................................... 78 图 24:LOAT 的扩展版本 ................................................................................................ 102
采购战斗机信息请求...
发动机更换后的飞行?发动机冷检是否足以获得飞行许可?(r) 是否有任何推力检查算法可用于在松开刹车前验证驾驶舱内的最大再热推力?在合格的发动机使用寿命结束时,推力是否会出现衰减?如果有,请说明。(s) 描述飞机上提供的喷气燃料启动器/启动马达。除了在地面上自主启动发动机外,它还涵盖哪些功能?它可以在地面和飞行中提供电气、液压和气动服务吗?其连续运行的最大持续时间额定值是多少?它可以在空中协助发动机启动吗?指定发动机启动(由启动器辅助)包络线。(t) 飞机发动机是否符合 Mil-E-5007E/任何其他军用标准?请说明标准。
栅极氧化物寿命预测与电荷到寿命预测的比较......
摘要 — 商用碳化硅 (SiC) 功率金属氧化物半导体场效应晶体管 (MOSFET) 的栅极氧化物可靠性对其应用至关重要。恒压时间相关电介质击穿 (TDDB) 测量通常用于评估正常运行下 SiC 功率 MOSFET 的电介质故障时间。最近提出了一种基于氧化物隧穿电流行为的电荷击穿方法来预测电介质故障时间。该方法耗时较少,但要求器件的氧化物漏电流行为遵循通用包络线。这项工作比较了电荷击穿方法和恒压 TDDB 方法对商用 1.2 kV SiC MOSFET 的预测故障时间。结果表明,在低氧化场 (E ox < 9 MV / cm ) 下应用的恒压 TDDB 方法对器件寿命的预测最为保守。

Minotaur IV-VI 用户指南 - 诺斯罗普·格鲁曼公司
4.3.有效载荷声学环境 ...................................................................................................................... 40 4.4.有效载荷冲击环境 ...................................................................................................................... 41 4.5.有效载荷结构完整性和环境验证 ............................................................................................. 43 4.6.热和湿度环境 ...................................................................................................................... 43 4.6.1.地面操作 ............................................................................................................................. 43 4.6.2.动力飞行 ............................................................................................................................. 44 4.6.3.氮气吹扫(非标准服务) ............................................................................................. 45 4.7.有效载荷污染控制 ................................................................................................................ 45 4.8.有效载荷电磁环境 ................................................................................................................ 46 5.有效载荷接口 ...................................................................................................................... 47 5.1.有效载荷整流罩 ...................................................................................................................... 47 5.1.1.92” 标准 Minotaur 整流罩 ...................................................................................................... 47 5.1.1.1.92” 整流罩有效载荷动态设计包络线 ............................................................................. 47 5.1.2.可选 110” 整流罩 ............................................................................................................. 48 5.1.2.1.110”整流罩有效载荷动态设计包络线 ...................................................................................... 48 5.1.3.有效载荷检修门 ................................................................................................................ 48 5.2.有效载荷机械接口和分离系统 ............................................................................................. 49 5.2.1.Minotaur 坐标系 ............................................................................................................. 49 5.2.2.NGIS 提供的机械接口控制图 ...................................................................................... 51 5.2.3.标准非分离式机械接口 .............................................................................................. 51 5.2.4.可选机械接口 ...................................................................................................... 51 5.2.4.1.有效载荷锥接口 ...................................................................................................... 53 5.2.4.2.双和多有效载荷适配器配件 ...................................................................................... 53 5.2.4.2.1.双有效载荷适配器配件 ...................................................................................... 53 5.2.4.2.2.多有效载荷适配器配件 (MPAF) ................................................................................ 55 5.2.4.2.3.Minotaur V 和 VI+ 有效载荷适配器配件...................................................................... 56 5.2.5.可选分离系统 ............................................................................................................. 57 5.2.5.1.NGIS 38” 分离系统 ............................................................................................. 59 5.2.5.2.行星系统电动光带 (MLB) ............................................................................. 60 5.2.5.3.RUAG 937 分离系统 ............................................................................................. 60 5.3.有效载荷电气接口 ............................................................................................................. 61 5.3.1.有效载荷脐带接口 ............................................................................................................. 61 5.3.2.有效载荷接口电路 ................................................................................................................ 62 5.3.3.有效载荷电池充电 ................................................................................................................ 62 5.3.4.有效载荷指令和控制 ............................................................................................................. 62 5.3.5.烟火引爆信号 ................................................................................................................ 62 5.3.6.有效载荷遥测 ............................................................................................................................. 63 5.3.7.有效载荷分离监视器环回 ................................................................................................ 63 5.3.8.遥测接口 ................................................................................................................ 63 5.3.9.非标准电气接口 ........................................................................................................ 63 5.3.10.电气发射支持设备 ................................................................................................ 63 5.4.有效载荷设计约束 ............................................................................................................. 64 5.4.1.有效载荷质心约束 ............................................................................................................. 64 5.4.2.最终质量属性精度 ............................................................................................................. 64
AC 20-161 - 飞机机载重量和平衡系统
c. 重量和平衡程序方法(负载累积方法)。OBWBS 操作精度可与现有的 OEM 和 FAA 推荐的程序进行比较,用于计算给定飞机配置的重量和平衡值。这些程序也称为负载累积方法,具有可接受的精度,这在过去的服务经验中得到了证明。从这些程序的分析中得出的负载累积方法重量和重心精度有助于确定 OBWBS 允许的操作和环境条件范围,而不会对 OBWBS 操作精度进行缩减。使用负载累积方法时适用的缩减范围也适用于 OBWBS 重量和重心测量,只要 OBWBS 操作精度保持等于或优于为负载累积方法确定的精度。对于任何比负载累积方法的精度更差的 OBWBS 操作精度,缩减重心包络线的限制。

AFTI/F-16 数字飞行控制系统... - CORE
尽管异步计算机操作的研究并非 AFT1 计划的主要目标,但研究异步计算机操作已成为一项主要活动。异步架构概念的初衷是提高 EM1 免疫力和整个系统的容错能力。人们认为,随着设计的成熟,对异步操作(可测试性、数据一致性和不确定操作)的担忧将得到缓解。在设计和鉴定 DFCS 方面投入了大量工程努力,并且对异步计算机操作有了更多的了解。尽管在鉴定过程中投入了大量精力和改进,但对可测试性的担忧仍然存在,因为在飞行测试中发生了与异步操作相关的异常。异步操作,加上解耦控制和双重故障/操作能力的复杂性,导致设计任务增加、鉴定期延长和可测试性边际降低。在扩展包络线后,对 DFCS 的任务性能进行飞行测试评估未发现任何与异步操作相关的新异常。
子部分 A 印度的一般程序...
CEMILAC 批准的飞行许可证书 (FCC) 列出了已批准的构造、系统限制、操作限制、已批准的包络线和放行条件,授权飞行测试机构进行飞行测试。飞行测试遵循 CEMILAC 批准的飞行测试规范中生成的要求。飞行测试机构为重要的测试阶段制定了飞行测试计划,其中包括计划的活动集和飞行测试目标。CEMILAC 通过飞行计划许可备忘录 (FPCM) 授予基于航空系统适航性的飞行许可。DGAQA 颁发表格 1090 或飞行安全证书。主承包商准备原型说明,以便在开发飞行试验期间操作和维护飞机的适航状态。测试可能会发现需要更改设计。这是一个反复的过程,直到设计被证明令人满意。飞行测试的详细技术要求在子部分 P 中给出。图 A.3 说明了 Ab-Initio 飞行测试的通用程序。在整个设计和开发阶段,需要实施严格的配置控制管理/流程。