XiaoMi-AI文件搜索系统
World File Search System区分的
硅中的分布式量子计算:
• T 中心分布式纠缠背景下的 Hong-Ou-Mandel (HOM) 协议:可以通过要纠缠的量子位发射的两个光子的干涉来建立远程纠缠。要使此过程成功,两个通信量子位(每个位于 T 中心)发射的光子必须是无法区分的——无论是波长、相位还是到达时间。成功发射两个无法区分的光子的能力可以用 HOM 协议来表征。此步骤是关键的系统校准检查,可确保未来尝试运行 Barrett-Kok 等纠缠协议时可能取得成功。

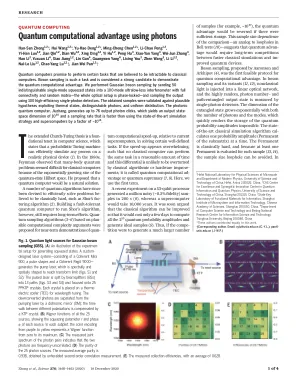
使用光子
量子计算机承诺执行某些被认为对古典计算机棘手的任务。玻色子采样是这样的任务,被认为是证明量子计算优势的有力候选者。我们通过将50个不可区分的单模单模状态发送到具有完整连接性和随机矩阵的100模式超级失误干涉仪中,通过将50个不可区分的单模单模式挤压状态发送到了高斯玻色子采样 - 整个光学设置是相锁的 - 并使用100个高效的单光子检测器对输出进行采样。针对利用热状态,可区分的光子和均匀分布的合理假设验证了所获得的样品。光子量子计算机Jiuzhang最多生成76个输出光子点击,该光子可产生10 30的输出状态空间尺寸,而采样速率比使用最先进的仿真策略和超级计算机的采样率更快。t
使用光子
量子计算机承诺执行某些被认为对古典计算机棘手的任务。玻色子采样是这样的任务,被认为是证明量子计算优势的有力候选者。我们通过将50个不可区分的单模单模状态发送到具有完整连接性和随机矩阵的100模式超级失误干涉仪中,通过将50个不可区分的单模单模式挤压状态发送到了高斯玻色子采样 - 整个光学设置是相锁的 - 并使用100个高效的单光子检测器对输出进行采样。针对利用热状态,可区分的光子和均匀分布的合理假设验证了所获得的样品。光子量子计算机Jiuzhang最多生成76个输出光子点击,该光子可产生10 30的输出状态空间尺寸,而采样速率比使用最先进的仿真策略和超级计算机的采样率更快。t
免责声明生成AI和高等教育
基于数据。llms通过学习模式和结构从大型文本数据集进行操作,以预测句子中的下一个单词并产生连贯和引人入胜的响应。这使他们能够与人类可能产生的内容生成上下文适当且通常无法区分的文本。
健康特别委员会提交的文件 - UC 研究资料库
• 拟议的基因技术法改革没有科学依据。风险分级框架与风险不成比例。它将降低监管负担,但会大大增加对人类健康和环境的风险。 • 我们认为,更换基于流程的框架是不合理的,因为没有对现行法规的实际独特成本进行实质性分析,也没有证据表明它们阻碍了创新。 • 简化在认证隔离设施中完成的工作合规性的替代基于流程的选项将更有效且更实惠。 • 拟议的改革基于对基因技术的理想化和肤浅的描述。与传统育种无法区分的理想结果只是每次使用基因技术时产生的众多产品之一。必须从产生的生物混合物中识别和确认理想的结果。 • 出于安全原因,所有其他强力诱变剂(包括化学和辐射诱变剂)都受到更严格的监督和控制。 • 能够产生类似危害的过程不一定会产生类似的风险。制造与传统育种无法区分的危害,并不等同于制造与传统育种无法区分的风险。• 新西兰将拥有世界上最极端的物种豁免组合(微生物、植物、动物)和工艺(例如 SDN2)豁免组合,且没有释放前逐案确认的安全网。• 构成与传统育种同等风险结果的因素不应留给次级立法。只有继续要求基因技术只能在经过认证的封闭设施中使用,并且结果必须确认符合释放标准,才能有效降低风险。• 该法案包括削弱新西兰人对基因技术可接受风险的决定权的条款。

过程矩阵的单次判别策略
因果关系这一主题最近在量子信息研究中引起了广泛关注。这项工作研究了过程矩阵之间的单次判别问题,这是一种定义因果结构的通用方法。我们提供了正确区分的最佳概率的精确表达式。此外,我们提出了一种使用凸锥结构理论实现此表达式的替代方法。我们还将判别任务表示为半正定规划。因此,我们创建了 SDP 来计算过程矩阵之间的距离,并根据迹范数对其进行量化。作为一个有价值的副产品,该程序找到了判别任务的最佳实现。我们还发现了两类可以完美区分的过程矩阵。然而,我们的主要结果是考虑与量子梳相对应的过程矩阵的判别任务。我们研究了在判别任务期间应使用哪种策略(自适应或非信号)。我们证明了无论选择哪种策略,区分两个过程矩阵为量子梳的概率都是相同的。
