XiaoMi-AI文件搜索系统
World File Search System半自动

使用动态流量数据增强自动驾驶
项目背景该项目旨在为自主和半自主驾驶的高级解决方案开发,同时测试6G网络技术的功能以支持实时,安全至关重要的服务。这些解决方案旨在为驾驶员看不见的物体提供可见性,即使在各种天气条件下也可以被现有车辆传感器检测到。这涉及创建动态的,实时的环境,交通和天气状况,以及检测自动驾驶或半自动驾驶汽车的障碍。

利用拓扑元素提高虚拟现实神经元追踪的可用性
摘要 — 连接组学领域的研究人员正在努力重建大脑中的神经连接图,以便从根本上了解大脑如何处理信息。构建此连接图是通过荧光显微镜成像技术获取的高分辨率图像堆栈来追踪神经元来完成的。虽然已经提出了大量自动追踪算法,但这些算法通常依赖于数据中的局部特征,并且在嘈杂的数据或模糊的情况下会失败,需要耗时的手动校正。因此,手动和半自动追踪方法仍然是创建精确神经元重建的最新方法。我们提出了一种新的半自动方法,该方法使用拓扑特征来指导用户追踪神经元,并将该方法集成到以前用于手动追踪的虚拟现实 (VR) 框架中。我们的方法增强了可视化和与拓扑元素的交互,从而可以快速理解和追踪复杂的形态。在我们的试点研究中,神经科学家表现出强烈的偏好,他们更喜欢使用我们的工具,而不是之前的方法,他们表示在追踪过程中疲劳感更少,并称赞它能够更好地理解可能的路径和替代方案。对追踪的定量评估表明,与完全手动的方法相比,用户的追踪速度有所提高,同时保持了类似的准确性。


刺激频率 - 最多100 Hz
电动机阈值(MT)是确定RTMS处理“剂量”的方式。这是大多数RTMS协议的重要度量。MT测量的准确性是实现治疗有效性和安全性的关键。与治疗位置映射相关,必须快速但准确地执行MT测定。Neuro-MS.NET软件提供了用于MT确定和大脑映射的一系列工具:使用EMG放大器,使用步骤算法,F3定位器和视觉帮助的自动MT测定,半自动MT测定。
sky-eye-systesm-brochure.pdf - Fiera 365
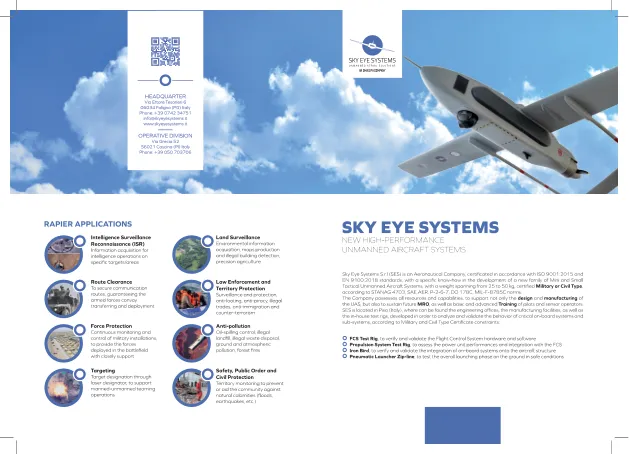
第五代触摸屏地面站 (STANAG 4586),具有全自动和半自动导航模式 数据链网络攻击弹性,高清数字数据 使用跟踪天线时操作半径可达 80 公里 长时间停留目标(最长 16 小时,取决于任务) 降落伞和安全气囊着陆配置 可选回收系统,用于在敌对和海洋环境中进行精确自动回收 快速部署和多重安全控制 自供电、独立于逃逸、低物流足迹的气动发射器

自动检测,识别和计数深...
太平洋中的深海纹状会具有强大的商业,文化和娱乐价值,尤其是鲷鱼(Lutjanidae),这些价值(Lutjanidae)构成了大部分捕捞量。然而,由于数据的稀缺,管理这些遗迹是具有挑战性的。立体声诱饵的远程水下视频站(BRUV)可以提供有关鱼类股票的有价值的定量信息,但是手动处理大量视频是耗时的,有时甚至是不现实的。为了解决这个问题,我们使用了基于区域的卷积神经网络(更快的R-CNN),这是一种深度学习体系结构来自动检测,识别和计算BRUV中的深水鲷鱼。视频是在新喀里多尼亚(南皮林)收集的,深度为47至552 m。使用在6,364张图像中观察到的11个深水鲷鱼物种中的12,100个注释的数据集,我们为具有舒适注释的6种物种获得了良好的模型性能(F-Measures> 0.7,最高0.87)。视频中最大丰度的自动和手动估计之间的相关性很高(0.72 - 0.9),但较快的R-CNN显示出低估的偏见。一种半自动协议,我们的模型在处理BRUV镜头时支持手动观察者,改善了性能,与手动计数的相关性为0.96,对于某些关键物种,则具有0.96的相关性和完美的匹配(r = 1)。此模型已经可以帮助手动观察者半自动地处理BRUVS录像,并且当更多培训数据可用以降低假否定率时,肯定会改善。这项研究进一步表明,在海洋科学中使用人工智能是进步的,但对未来有必要。

生物传感器和生物电子学
在这项工作中,具有纳米特征的纳米结构导电膜是通过激光组装而直接产生的,并将其整合到完整的硝基纤维素传感器中。纤维素底物允许托管活细胞,而纳米结构膜的纳米酶活性可确保sames释放的无酶实时检测过氧化氢(H 2 O 2)。详细说明,使用CO 2 -Raser绘图仪通过同时还原和模式的氧化石墨烯和铂阳离子来生产高度去角质的氧化石墨烯3D膜3D膜,该薄膜用裸铂纳米烟饰面。将纳米结构膜集成到硝酸纤维素底物中,并使用负担得起的半自动打印方法制造完整的传感器。直接H 2 O 2测定的线性范围为0.5 - 80μm(r 2 = 0.9943),检测到0.2μM。实时细胞测量值是通过将传感器放置在培养基中,确保其在传感器表面上的粘附;两种细胞系分别用作非肿瘤(VERO细胞)和肿瘤(SKBR3细胞)模型。对用佛波酯刺激细胞释放的H 2 O 2的实时检测;硝酸纤维素传感器返回了有关H 2 O 2的现场和实时定量信息,以证明有用的灵敏度和选择性,从而区分了肿瘤细胞。提出的策略允许使用简单的台式仪器进行低成本的串行串行序列半自动生产,从而铺平了对癌细胞细胞病理学状态的简单且负担得起的监测的道路。