XiaoMi-AI文件搜索系统
World File Search System协作

艾滋病毒成年人中的整合酶链转移抑制剂和心血管事件:艾滋病毒 - 可控协作中目标试验的仿真
Rein,S.M.,Lodi,S.,Logan,R.,Toulomi,G.,Antoniadou,A.,Wikktop,L.,Bonnet,F.,Van Sighem,A. Suial,B.,... Hernan,M。A. (2023)。 整合酶链转移抑制剂的使用和艾滋病毒成年人的心血管事件:艾滋病毒 - 可控协作中目标试验的仿真和抗逆转录病毒疗法疗法同类协作。 lancet HIV,10(11),E723- E732。 https://doi.org/10.1016/s2352-3018(23)00233-3Rein,S.M.,Lodi,S.,Logan,R.,Toulomi,G.,Antoniadou,A.,Wikktop,L.,Bonnet,F.,Van Sighem,A. Suial,B.,... Hernan,M。A.(2023)。整合酶链转移抑制剂的使用和艾滋病毒成年人的心血管事件:艾滋病毒 - 可控协作中目标试验的仿真和抗逆转录病毒疗法疗法同类协作。lancet HIV,10(11),E723- E732。https://doi.org/10.1016/s2352-3018(23)00233-3

研究燃料电池拖拉机传输系统和控制策略参数的协作优化参数
摘要。分布式燃料电池拖拉机是一种新型的动力拖拉机。传输系统和控制策略参数会影响整个机器的能量利用效率。目前在这一领域没有研究。为了解决分布式双运动式氢燃料电池拖拉机的整个机器的低能利用问题,提出了一种合作优化方法,基于粒子群优化(PSO)算法,用于用于传输系统的参数和传输系统和能量的Dual Dual Motor-Motor-Motor-Motor-Motor-Motor-Motor-Motor-Motor-Motor-Motiven viren燃料电池燃料电池燃料燃料燃料燃料电池tractor。根据拖拉机动力学分析和等效氢消耗理论,建立了燃料电池拖拉机传输参数等效氢消耗模型,车轮端传输比以及氢燃料电池工作能力的上和下阈值作为控制变量的最小氢消耗是基于MAT的最小氢化量,并将其作为模拟方法,并将其作为模拟方法。结果表明,在耕作条件下,与基于规则的控制策略相比,燃料电池拖拉机传输系统和控制策略参数的提议的协作优化方法可以合理地控制燃料电池和电源电池的运行状态,确保燃料电池在高效范围内运行,并在燃料电池系统的总体范围内运行,并在燃料电池系统的总体范围内效力(SOIS),并在合理的范围内控制电池。拖拉机等效氢消耗量减少了7.84%。

凝视失败:调查人类目光以应对协作任务中的机器人失败
摘要 - 机器人很容易犯错,这可能会对他们在与人类用户的协作任务中的队友的信誉产生负面影响。从这些失败中检测和恢复对于维持用户的有效信任水平至关重要。但是,机器人可能会失败而不意识到它。检测这种失败的一种方法可能是分析人类的非语言行为和对失败的反应。这项研究调查了人类凝视动力学如何表明机器人的失败,并检查了不同类型的故障如何影响人们对机器人的看法。我们与27名参与者进行了一项用户研究,与机器人移动操纵器合作解决了Tangram难题。机器人被编程为经历两种类型的故障 - 执行和决策 - 在任务的开头或结束时发生,无论是否确认失败。我们的发现表明,机器人故障的类型和时机显着影响参与者的凝视行为和对机器人的感知。具体来说,执行故障导致了更多的目光转移并增加了对机器人的关注,而决策失败导致感兴趣领域的凝视过渡的熵较低,尤其是在任务结束时发生故障时。这些结果表明,凝视可以作为机器人故障及其类型的可靠指标,也可以用于预测适当的恢复动作。索引术语 - 动物失败,凝视动态,人机协作

欧洲数字协作经济平台的旅游业使用:数字政策的情况,行为和影响
建议引用:Mendieta-Aragón,Adrián;劳拉(Laura)Rodríguez-Fernández; Navío-Marco,Julio(2023):欧洲数字合作经济平台的旅游业使用:数字政策的情况,行为和影响,第32届欧洲国际电信协会会议(ITS):“实现欧盟数字十年 - 在欧盟的数字十年 - 更容易完成?”,马德里,西班牙,2023年6月19日至20日,国际电信协会(ITS),卡尔加里
R&D协作提案 /公司... < / div>国际项目
CSIR国家环境工程研究所(CSIR-NEERI)是科学与工业研究委员会(CSIR)的组成实验室。csir本身以其在科学和技术中的研发知识基础而闻名。csir拥有38个国家实验室,39个外展中心,3个创新综合体和5个单位的网络。CSIR的专业知识得到4600名活跃科学家和8000名科学技术人员的支持。CSIR的作品涵盖了广泛的范围,包括无线电和空间物理学,海洋学,地球物理学,化学物质,遗传学,生物技术和纳米技术,以及采矿,航空和环境工程。它在与环境,水,水,食物,住房,能源和农业有关的社会努力中发挥了作用。neeri成立于1958年,由印度政府资助。它是环境科学与工程学的先驱实验室。Neeri在钦奈,德里,海得拉巴,加尔各答和孟买有五个区域中心。Neeri的愿景是成为可持续发展环境科学和工程领域的领导者。 其任务是为环境可持续发展提供解决方案,并协助政府,工业和社会,尤其是印度贫困人口。 csir积极参与加强其专利组合。 ,它确保了授予印度公共资助的研发组织授予的美国专利,并每年申请众多印度和外国专利。Neeri的愿景是成为可持续发展环境科学和工程领域的领导者。其任务是为环境可持续发展提供解决方案,并协助政府,工业和社会,尤其是印度贫困人口。csir积极参与加强其专利组合。,它确保了授予印度公共资助的研发组织授予的美国专利,并每年申请众多印度和外国专利。csir还专注于企业家精神,旨在商业化创新和发展新的经济领域。csir的使命是“为新印度建造新的CSIR”,具有为创新驱动的行业的全球影响力和技术的愿景

阿尔茨海默病和相关痴呆症的数字健康技术:景观分析和社区协作努力的初步结果
● 明确评估为数字治疗或干预措施 ● 依赖于住院或临床管理,不太可能在现实世界环境中使用,例如磁共振或计算机断层扫描成像 ● 专门针对聚合成像或电子健康记录数据进行训练的算法。我们确实包括了任何通过远程数字传感器技术在实验室环境之外收集的数据上训练的算法
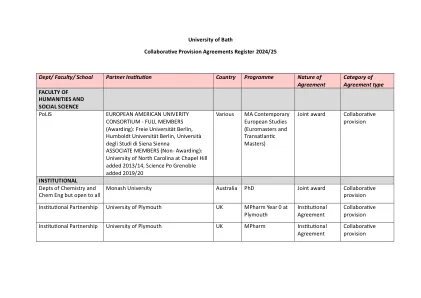
协作条款的注册
Dept/ Faculty/ School Partner Institution Country Programme IRO Humanities & Social Sciences Universidad Nacional de San Martin Argentina Politics, Languages & International Studies School of Management Universidad Austral Argentina Management School of Management Universidad de San Andres Argentina Management Engineering & Design University of Queensland Australia Chemical Engineering Humanities & Social Sciences Southern Cross University Australia Health School of Management University of Queensland Australia Management Humanities & Social Sciences University of昆士兰州澳大利亚澳大利亚澳大利亚澳大利亚澳大利亚大学昆士兰州昆士兰州澳大利亚科学系科学学院的昆士兰州经济学学院不包括药学科学技术学院维也纳奥地利科学科学学院,不包括药学科学大学天主教大学(UCL)比利时医学与药理学工程学和设计莫纳克尼克大学化学校园化学和社会化学科学和社会化学科学和社会化学科学杂志,蒙特利尔加拿大管理学院加拿大安大略加拿大管理管理皇后大学管理学院加拿大约克大学管理学院管理学院西蒙·弗雷泽大学加拿大加拿大科学科学科学科学科学学院科学科学学院不包括药学科学西蒙·弗雷泽大学加拿大加拿大加拿大大学语言与国际研究
2025工作报告协作计划
我很高兴在2025年介绍北约科学技术组织(STO)合作计划(CPOW)。CPOW是Sto的核心产品,也是我们对发展现代可互操作能力的主要贡献。包括八种不同的工作计划和400多个研究活动,它使北约国家和合作伙伴与科学技术(S&T)相比,以确保战场的成功。因此,履行STO的“授权北约技术优势”的使命是关键。在CPOW下进行的活动侧重于对北约军队至关重要的领域,例如:网络,空间,传感器,武器,指挥和控制,人机接口,建模和模拟,人工智能,量子技术和操作分析。目前在八个科学和技术委员会(STC)进行的这项工作为我们的军事和安全组织带来了尖端的能力。2025 CPOW报告详细介绍了2025年CPOW的公开释放部分,其中包括所有正在进行的未分类项目的列表。CPOW背后的引擎是一种自愿和低启发性的协作业务模型,汇集了大约5,000名最优秀的,最优秀的科学家,工程师,工程师,工程师,行业和行业,跨越Nato和Acartia和Academia和Acartia和Acartia和Acartia和Acartia和Acartia和Acartia和Acartia和Academia and Acation和Acartia和Acartia和Acartia和Acartia和Acartia natoia和Acartia和Acartia和Acartication nato;它们总的来说,它们构成了世界上最大的国防S&T研究网络。在合作支持办公室(CSO)中,我们的工作是管理,培育和发展该网络,并支持国家协作协作。

基于EMG的可变阻抗控制,并保证协作机器人技术的无动度保证
I.机器人技术的演变以及物理人类机器人相互作用(PHRI)的最新进展倾向于朝着机器人机制和控制策略的面向人类方向设计。在此框架中,表征人类操作员的行为成为关注的中心,尤其是在人类机器人协作系统的情况下。即使在确定的环境中运行时,与人类操作员相比,完全自动化的机器人系统在精确,可重复性和负载能力方面表现出更高的性能,许多任务都需要在未预测的事件的情况下进行快速判断和适应的能力。在这种情况下,协作系统旨在结合机器人力量和精度,以及操作员的判断和灵活性。随着协作机器人的开发(称为Cobots),人类机器人的合作已成为在多个应用程序[1]或机器人辅助医疗干预(例如康复机器人)[2] [2] [2] [2]等多个应用领域中至关重要的研究主题。在协作场景中,以最佳方式处理物理接触的问题是一个关键问题。这通常可以通过控制机器人及其环境之间相互作用的合规性来获得,从而导致经典阻抗

伦敦科技桥通过新的协作空间打破障碍
“自一年前开始虚拟会议以来,终于有了一个地方来举行这些重要的面对面会议和协作活动,这真是太好了。我们正处于世界上最先进的技术中心之一的中心,因此能够为我们的海军问题带来尖端技术解决方案,”他说。“我们将专注于具有挑战性的行业,解决我们的海军正在努力解决的一些最紧迫的问题,并让我们的水手和海军陆战队员关注英国一些最伟大的新技术”