XiaoMi-AI文件搜索系统
World File Search System单次测量

利用 Autler-Townes 效应进行声子数状态的单次测量
捕获离子量子信息处理的常用方法是利用电子态存储信息,而离子链共享的运动模式可实现纠缠操作[1]。然而,运动模式可以发挥更积极的作用。例如,运动自由度可用于存储量子信息[2],从而允许使用捕获离子进行连续变量的量子信息处理。运动模式也是量子逻辑谱学中非常重要的工具[3],这使得精确的原子钟成为可能[4]。此外,在计量学中,非经典离子运动状态可以发挥优势[5 – 7]。从更基本的方面来看,捕获离子运动在量子热力学研究中充当工作介质[8 – 10]。研究陷阱势变化时声子对产生的动力学可以模拟粒子的产生,从而建立量子信息处理和宇宙学之间的联系[11]。最后,局部声子的测量及其跟踪使得运动自由度的量子模拟成为可能[12,13]。捕获离子的运动可以用各种方法测量[8,12,14 – 19],包括通过交叉克尔非线性[18,20,21]和复合脉冲序列[12]。还有使用快速绝热通道(RAP)[22,23]和受激拉曼绝热通道(STIRAP)[24]序列或多色振幅调制的方案

量子力学 II:PHYS 314(2020 年春季)家庭作业 4 — 截止日期为 3 月 2 日星期一。
(d) 设想你不是在时间 T 进行单次测量,而是在时间 ∆ t 、2∆ t ……进行一系列 N 次宇称测量,直到 N ∆ t = T 。假设 N 非常大,∆ t ≪ ( E 2 − E 1 ) / ℏ ,在时间 T 找到具有正宇称系统的概率是多少?将此概率与在 t = T 时通过单次测量找到正宇称状态的系统概率(即你在部分 (c) 中的答案)进行比较。系统在初始状态的“冻结”
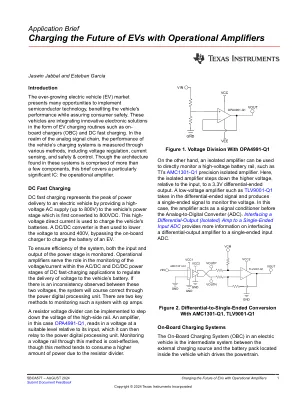
用操作放大器向HEV/EV的未来充电
监视每个单独的逆变器腿使用低侧电流传感拓扑,而无需隔离放大器就可以完成,因为每条腿的共同模式电压接近零。有三种方法可以实现低端电流感应。一,二或三转的拓扑。虽然单次测量技术趋向于更高的带宽要求,但三转解决方案要求较低的速度,通用物质放大器(例如TLV9061-Q1),因为您能够单独监视每条腿。在OBC系统中准确的电流传感的一项重要要求是确保定居时间尽可能短,这就是为什么建议将TLV9061-Q1(10 MHz Unity增益宽宽放大器(1 µs沉降时间))以使该应用程序快速响应电流的变化。

一项关于全球LIDAR定位的调查
对自己姿势的抽象知识是所有移动机器人应用程序的关键。因此,姿势估计是移动机器人核心功能的一部分。在过去的二十年中,LiDAR扫描仪已成为机器人定位和地图的标准传感器。本文旨在概述基于激光雷达的全球范围的最新进展和进步。我们首先提出问题并探索应用程序范围。然后,我们对方法论进行了综述,包括诸如地图,描述符的近期主题和跨机器人本地化等几个主题的最新进步。本文的内容是在三个主题下组织的。第一个主题涉及全球地方的结合和本地姿势估计。第二个主题是将单次测量升级到顺序全局定位的顺序测量值。最后,第三个主题侧重于将单机器人全局本地化扩展到多机器人系统中的跨机器人本地化。我们通过讨论开放式挑剔和有前途的全球liDar局部局限性的有希望的指示来结束调查。据我们最大的知识,这是第一个compre-
![arXiv:2409.02509v1 [quant-ph] 2024 年 9 月 4 日](/simg/9\9e13219e1d5a20db0a7166df4e72db959a994113.webp)
arXiv:2409.02509v1 [quant-ph] 2024 年 9 月 4 日
分布式量子计算是在有限规模的量子处理器上进行大规模量子计算的一种实用方法。它可以通过飞行量子比特中的直接量子通道来实现。此外,预先建立的量子纠缠也可以充当具有局域操作和经典通道的量子通道。然而,纠缠伪造技术不需要量子通道和纠缠等量子关联,我们只需使用局域操作和经典通道就可以经典地伪造纠缠态。在本文中,我们展示了在两个量子处理器上实现非局域量子电路的方法,这些方法不需要任何量子关联,这是基于使用经典伪造的贝尔态进行隐形传态相当于量子态层析成像的事实。作为补偿,单次测量的开销会增加,并且需要几个辅助量子比特。我们的结果扩展了集成量子处理器的可能性。我们期望我们的方法能够补充分布式量子计算的工具箱,并促进量子计算规模的扩展。

CMOSens EcoLine EM1 - Farnell
CMOSens EcoLine 质量流量计的核心由 Sensirion 无与伦比的 CMOSens ® 传感器技术驱动。因此,CMOSens EcoLine EM1 质量流量计以极具吸引力的系统成本提供了无与伦比的性能。单个设备覆盖的范围为 0.05 ln/min 至 200 ln/min。CMOSens EcoLine EM1 以 5ms 的内部流量积分时间为运行。这可以正确测量和显示快速变化的信号。但通常,与快速单次测量相比,更长时间内的精确总流量更受关注。为此,CMOSens EcoLine EM1 质量流量计可以设置为较慢的读取时间(见表 2)。传感器内部仍以 5 ms 片段进行积分并识别快速信号变化,但对于读数,将计算整个周期内的总流量。因此,CMOSens EcoLine 质量流量计非常适合在需要监测快速变化的气体流量并进行精确汇总的困难测量条件下使用。CMOSens EcoLine EM1 质量流量计可测量真实质量流量,不受环境温度和压力变化的影响。只需将要测量的气体连接到 CMOSens EcoLine EM1 设备,即可获得瞬时气体质量流量积分,积分时间可在 5 毫秒至 640 毫秒之间选择。根据类型,通过连接 CMOSens EcoLine EM1 质量流量计,可直接测量 0.1 ln/min 至 200 ln/min 之间的流量范围。此外,

具有拒绝数据的 MDI-QKD 的资源高效实时极化补偿
独立于测量设备的量子密钥分发 (MDI-QKD) 弥补了检测系统中的所有安全漏洞,是密钥共享的有前途的解决方案。偏振编码是最常见的 QKD 编码方案,因为它易于准备和测量。但是,在 MDI QKD 中实施偏振编码会带来额外的挑战,因为必须在两个相互无偏的基础上保持偏振对齐,并且必须在两条路径(Alice-Charlie 和 Bob-Charlie)上保持偏振对齐。偏振对齐通常通过中断 QKD 过程(降低总体密钥生成率)或使用与量子信道复用的额外经典激光源进行偏振对齐来完成。由于低密钥速率和成本是阻碍 QKD 系统广泛采用的两个最紧迫的挑战,因此使用额外资源或降低密钥速率与使 QKD 具有商业可行性背道而驰。因此,我们提出并实施了一种新型的 MDI-QKD 系统中的偏振补偿方案,通过回收部分丢弃的检测事件来避免上述缺点。我们的方案基于与诱饵强度相对应的单次测量来实时评估偏振漂移。我们的全自动实验演示将 40 公里卷绕光纤(无绝缘护套)的平均偏振漂移保持在 0.13 rad 以下至少四个小时。平均量子比特误码率为 3.8 %,我们实现了 7 的平均密钥率。每脉冲 45 × 10 − 6 比特。

长寿命环境声呐浮标对...的潜在影响
军事活动的重点最近已从大面积交战转向区域冲突。因此,海军海上作战继续向复杂的浅水近岸环境中的沿海战争发展。这种演变需要新的传感器、先进的作战概念和改进的数据分析能力等。在这些恶劣环境区域规划行动很困难,因为准确预测战术传感器性能取决于对当地环境条件的详细了解。因此,战术任务规划很少是最佳或有效的 - 通常导致覆盖范围不足、风险增加和任务成功率降低。美国海军正在探索延长寿命的环境声纳浮标概念,以更好地表征沿海环境。一些设计包含用于测量海洋温度的热敏电阻串和用于测量环境噪声的水听器。这种复杂的声纳浮标比传统的单次测量消耗性深海温度计要昂贵得多,但它可以提供更彻底的环境评估。本文从覆盖面积和检测概率的角度研究了增加的传感器成本与提高的 ASW 性能之间的权衡。对于这种权衡分析,使用了日本海的温度数据以及来自档案数据和噪声统计模型的真实动态环境噪声场。然后模拟了几个虚构的环境浮标在该区域漂流并在几天内收集数据。分析表明,漂流的延长寿命环境声纳浮标场可以显着改善环境表征、战术规划和 ASW 检测性能。

量子测量置信度的实验射击估计
测量结果将量子力学连接到“古典”世界。,除非测得的量子状态属于已知的正交集,否则不可能通过单次测量测量量子系统的状态。因此,在没有一些先验知识的情况下,不能完全确定国家。由于所有测量值的固有不确定性,因此只能提供有关观察到的量子系统的部分信息[1-3]。理解并实际上达到了可实现的准确性的基本限制是量子测量中的首要问题。已经表明,量子测量值可以显着通过经典测量值,在某些情况下,非正式地实现了准确性的基本限制,请参见例如[4-10]。通常,由于量子测量是概率的,因此这些努力描述了实验结果的概率,而不是每次测量中都会发生什么。在这里,我们首次实验了每个单个测量结果的置信度估计值,并验证每个单次估计是否正确预测了测量相应行为的准确性。从已知的一组状态中识别随机分布的量子状态是量子测量的重要应用[4,11-13]。由于不可能对非正交状态的完美识别,因此可以确定某个功绩,并相应地优化了测量[11,14 - 16]。还有其他功绩数字。理论上,这样的值得一提的是,在不学习哪种识别是正确且哪个是错误的情况下获得正确结果的可能性。可以优化量子测量,以便这种概率可以超过理想经典测量值的所谓射击限制,[5,6,9,17 - 28]。例如,可能需要知道没有错误的情况下识别出哪些状态。