XiaoMi-AI文件搜索系统
World File Search System即身

为... 设计一架可搭载 450 名乘客的混合翼身飞机
摘要:ACFA 2020(柔性飞机主动控制)是欧盟委员会第七研究框架计划资助的合作研究项目。该项目涉及 2020 年飞机配置(如翼身融合 (BWB) 飞机)的创新主动控制概念。ACFA 的主要目标是设计一种新型超高效 450 座 BWB 型飞机,以及为此类飞机提供强大的自适应多通道控制架构。新设计的控制器的目标是雄心勃勃地改善乘坐舒适度和操控品质,以及减轻 BWB 型飞机的负荷。根据实现的负荷减少,可以调整 450 座飞机的结构尺寸,以实现雄心勃勃的减重目标,从而进一步提高燃油效率。主动控制要求分别影响控制面和整体飞机设计的设计过程。因此,传统的飞机设计流程必须适应新的要求。本文描述的飞机设计框架已在 ACFA BWB 飞机的开发中证明了其效率。在一年的时间内,在多个领域要求的约束下开发了机身。本文介绍了 BWB 飞机设计活动的过程和结果,为详细概念分析以及多输入多输出控制架构的研究奠定了基础。
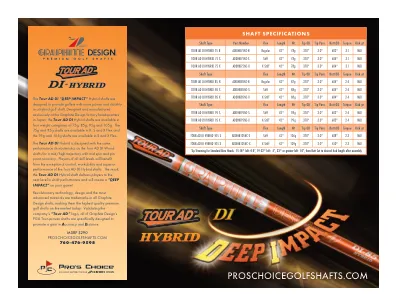
Tour-AD-DI-Hybrid-2020.pdf
Tour AD DI Hybrid 的设计性能特点与 Tour AD DI Wood 杆身相同,具有中/高弹道、中等旋转和精准度。各种水平的球员都将受益于 Tour AD DI Hybrid 杆身的出色控制、可操作性和卓越性能。因此,Tour AD DI Hybrid 杆身将球员的杆身性能提升到一个新的水平,并将对您的比赛产生“深远影响”!

化学智能导师利用物理和虚拟操作进行具身学习
摘要。混合式教育技术可充分利用物理和虚拟操作的互补优势。然而,如何最好地结合这些操作尚不清楚。先前的研究侧重于结合物理和虚拟操作,根据它们是否突出特定概念按顺序提供它们。这项研究大多忽略了可以将学生的概念理解建立在身体动作上的具体学习机制。为了解决这个问题,我们对 80 名本科生进行了一项化学学习实验室实验。我们比较了虚拟和物理操作的不同排序方式,这些方式首先让学生参与到具体体验中,或者使目标概念突出。结果表明,在学习序列的早期提供具体体验可以增强概念学习。这些发现扩展了现有的物理和虚拟操作混合理论,并为混合交互式教育技术的开发人员提供了实用建议。

BEHAVIOR-1K:具有 1,000 个日常活动和现实模拟的具身 AI 基准
摘要:我们提出了 BEHAVIOR-1K,一个以人为本的机器人综合模拟基准。BEHAVIOR-1K 包括两个部分,分别由“您希望机器人为您做什么?”这一广泛调查的结果指导和推动。第一个部分是定义 1,000 种日常活动,基于 50 个场景(房屋、花园、餐厅、办公室等),其中有 5,000 多个对象,并标注了丰富的物理和语义属性。第二个部分是 O MNI G IBSON,这是一个新颖的模拟环境,它通过逼真的物理模拟和刚体、可变形体和液体的渲染来支持这些活动。我们的实验表明,BEHAVIOR-1K 中的活动是长期的并且依赖于复杂的操作技能,这两者对于最先进的机器人学习解决方案来说仍然是一个挑战。为了校准 BEHAVIOR-1K 的模拟与现实之间的差距,我们提供了一项初步研究,研究如何在模拟公寓中使用移动机械手学到的解决方案转移到现实世界中。我们希望 BEHAVIOR-1K 的人性化本质、多样性和现实性能够使其对具身化 AI 和机器人学习研究有价值。项目网站:https://behavior.stanford.edu。

野生系统理论:克服计算问题......
多年来,计算主义认知科学家在心智描述中运用表征和有效因的概念,而以动态系统为导向的生态心理学家则摒弃表征主义和有效因,转而主张多尺度、偶然相互作用和具身化。本文介绍了一种最近发展起来的具身化理论——野生系统理论 (WST),该理论就是为克服这种矛盾而开发的。WST 将生物体概念化为它们出现并维持自身的系统发育、文化、社会和发展背景的多尺度自我维持的具身化。这种自我维持的背景具身化自然且必然与它们所体现的多尺度背景有关。因此,意义(即内容)是它们的构成要素。这种内容方法克服了计算主义对表征的需求,同时满足了生态对多尺度偶然相互作用的偏好。

重新审视脑机接口的具体实现
摘要 研究人员越来越多地探索为健全用户部署脑机接口 (BCI),其动机是比现有的身体介导交互更直接地访问心理状态。这种动机似乎与长期以来 HCI 对具身化的强调相矛盾,即普遍认为身体对认知至关重要。本文通过回顾具身认知和交互的见解来解决这一明显的矛盾。我们首先批判性地审视最近对 BCI 的兴趣,并确定大脑认知与更广泛的身体整合的程度是研究的核心关注点。然后,我们定义了综合认知观点对界面设计和评估的影响。我们得出的一个违反直觉的结论是,具身化本身不应该意味着比 BCI 更倾向于身体介导的交互。相反,它可以通过以下方式指导研究:1) 为 BCI 性能提供基于身体的解释,2) 提出在认知模块化观点中被忽视的评估考虑因素,以及 3) 通过将其设计见解直接转移到 BCI。最后,我们反思了 HCI 对具身化的理解,并确定了迄今为止被忽视的具身化的神经维度。

具象虚拟地理:身体、空间和数字环境之间的联系
Evans, L. (2018)。虚拟现实的重新出现。劳特利奇。Farman, J.(2020)。移动界面理论:具身空间和定位媒体。劳特利奇。Featherstone, M.,& Burrows, R. (1996)。网络空间/赛博体/赛博朋克:技术具身文化。SAGE。Fox, J.、Bailenson, J. N.,& Tricase, L. (2013)。性化虚拟自我的具身化:普罗透斯效应和经验

融合思维与机器:探究认知架构与生成模型的融合以实现一般具身智能
认知架构与生成模型是实现一般具身智能的两种截然不同的方法,本文探讨两者的初衷、实现方式和优缺点,旨在将其融合为一般具身智能,以发挥其优势,补足其弱点。首先,通过分析两者不同的应用场景和进一步研发的难点,探索两者之间的潜在协同作用和可能的整合策略。然后,通过结合认知架构(模拟类人认知过程)和生成模型(擅长根据学习模式生成新内容)的优势,实现创建具有增强整体能力的具身智能的目标。最后,本文结合示例,提出了一个综合框架,展示了如何集成认知架构、生成模型和其他人工智能方法以实现一般具身智能。