XiaoMi-AI文件搜索系统
World File Search System反向旋转

反向旋转垂直风力涡轮机先进复合材料风力涡轮机叶片的制造
在过去的几十年中,风能发展迅速,目前是最有前途和经济可行的能源之一[2]。欧盟委员会的《2050 年能源路线图》指出,将增加对可再生能源技术的投资。预计到 2050 年,风力发电将比任何其他可再生能源技术提供更多的电力[3]。风力涡轮机主要可分为两大类:水平轴风力涡轮机 (HAWT) 和垂直轴风力涡轮机 (VAWT)。VAWT 类型似乎比 HAWT 更古老 [4],但在风能行业,HAWT 类型更受欢迎,主要是因为产生的能量更多 [5]。随着人们对风能的兴趣日益高涨,VAWT 被认为是浮动海上风力涡轮机概念 [6] 和家庭用电中 HAWT 的潜在替代品。随着两种主要涡轮机类型 Darrieus 和 Savonius 垂直涡轮机的发明[4],人们对 VAWT 的兴趣日益增加。图 1 展示了 Darrieus 和 Savonius 风力涡轮机以及 Darrieus 涡轮机的一个特殊情况——H Darrieus 转子。
![arxiv:2502.08065v1 [Quant-ph] 2025年2月12日](/simg/1\1ff37f1096e986f303601b6afb0c0417df60bc05.webp)
arxiv:2502.08065v1 [Quant-ph] 2025年2月12日
提出了一种基于机械振荡器驱动的离子链的可实现和可控平台中实现量子电池的方案。研究了两级离子之间跳跃相互作用的影响以及离子与外部机械振荡器之间的偶联相互作用在电池充电过程中的影响。通常会忽略系统中的反向旋转波术语的重要性,并被分析,发现电池的充电能量和电池的麦角镜受到反向旋转波项的极大影响。由于量子相干性的破坏,两级系统的量子相变受反向旋转波项的约束。最后,讨论了充电过程对离子之间距离的幂律依赖性。我们的理论分析为开发实用的量子电池提供了坚实的基础。

关于 ELGI - Amazon S3
# LED 描述 1 自动 表示机器处于自动开/关模式。当 1 时,LED 会发出琥珀色光。压力计划已启用(或)自动重启已启用 2 空气过滤器 当 1 时发出琥珀色光。空气过滤器服务应根据服务小时数2 进行。空气过滤器数字输入 (DPAF) 已打开且 DPAF 已启用 3 主电机过载 当主电机过载数字输入打开时,主电机过载发出红色光。4 反向旋转 当反向旋转数字输入关闭时,反向旋转发出红色光 5 冷却器故障 当冷却器数字输入打开时,发出红色光 6 压力 当 1 时发出红色光。HSP 数字输入已打开 2。模拟压力输入已打开(探头故障)Dis。压力高于设定的 HSP 7 温度在以下情况下亮红灯 1.模拟温度输入打开(探头故障) 2.断开。温度高于设定的跳闸温度。8 压差在以下情况下亮琥珀色灯 1.DPOF 数字输入打开且 DPOF 已启用 油过滤器服务到期 9 压差在以下情况下亮琥珀色灯 1.油分离器过滤器服务到期 2.高压差(仅当启用油底壳压力时) 10 启动和停止 1.机器停止/空闲时亮红灯 2.机器运行时亮绿灯

超强耦合量子拉比模型的容错放大与模拟
由光子猫态形成的猫态量子比特具有偏置噪声通道,即一种类型的错误占主导地位。我们通过将猫态量子比特耦合到光学腔,证明了这种偏置噪声量子比特也有望用于量子拉比模型(及其变体)的容错模拟。使用猫态量子比特可以有效增强反向旋转耦合,使我们能够探索依赖于反向旋转相互作用的几种迷人的量子现象。此外,偏置噪声猫量子比特的另一个好处是两个主要错误通道(频率和幅度不匹配)都呈指数级抑制。因此,模拟协议对于确定投影子空间的参数驱动的参数误差具有鲁棒性。我们分析了三个例子:(i)量子态的崩溃和复兴;(ii)隐藏的对称性和隧穿动力学;(iii)成对猫码计算。
(SNA)BARRACUDA 苏弗伦级核攻击潜艇
特点 • 重量:约 1,300 公斤;直径:533.4 毫米(21 英寸),符合国际标准 • 能够拦截速度超过 50 节、射程超过 50 公里的所有目标 • 两个多叶反向旋转螺旋桨 • 专为公海和沿海作战而设计 • 采用有线制导,可保持更换目标的能力,并可进行无线发射,依靠鱼雷的探测能力进行自主制导

Celldrone - 模块化多旋翼飞机 - HAW Hamburg
摘要 电动多旋翼飞机在消防队、警察和军事单位中越来越受欢迎。这一趋势背后的驱动力是降低单位成本和提高能力。特别是传感器和微处理器技术的稳步发展允许使用更复杂的控制算法。目前具有更高能量密度的电池的发展将进一步加速这一趋势。本文的目的是介绍一种可扩展和模块化多旋翼飞机的新概念。这些飞机由三个或更多相同的六角形单元组成。每个单元包含两个管道式、直接驱动的反向旋转螺旋桨以及电机控制器、电池和一个控制单元。单元可以任意连接在一起,以创建高度冗余、节能和经济高效的飞机,以满足各种任务要求。
北约国家主要 HWT 和 LWT 概览及正在进行的...
轻型鱼雷 (NLT,也称为 Torpedsystem 47 [TP 47]) 是市场上其他值得注意的轻型鱼雷。大多数俄罗斯反潜鱼雷为 406 毫米(16 英寸)。大多数轻型鱼雷 (LWT) 使用更安静的电动机,同时重新训练足够的储备功率来追逐目标。Eurotorp 的 MU90/Impact LWT 中使用的最新电动机之一是 Atlas Elektronik 的无级变速 120kW 电动机。在这种武器和拥有 63kW 电动机的 BAE Systems StingRay 中,都使用了推进器。一些设计稍早的武器,如 Whitehead Alenia Sistemi Subacquei (WASS,Finmeccanica 公司旗下的子公司) A244/S(使用直流反向旋转电机)和 Bofors 水下系统 (şimdi SAAB) TP 43/TP 45,继续使用传统螺旋桨。美国轻型鱼雷不仅使用螺旋桨,还采用基于高能化学反应的推进系统,这是冷战的遗留问题。在此背景下,雷神技术公司的 Mk46 和 Mk54 LWT 使用 Otto II 燃料和五缸发动机。
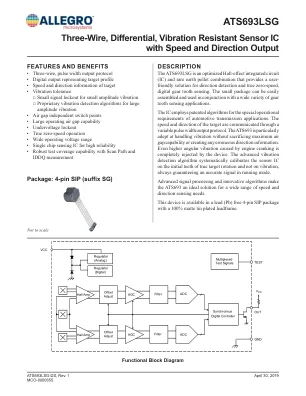
ATS693LSG - Allegro MicroSystems
1 典型值为 T A = 25°C 和 V CC = 12 V。在规定的最大和最小限度内,单个单元的性能可能有所不同。2 必须根据功耗和结温调整最大电压;请参阅功率降额部分。3 负电流定义为从指定设备端子流出(源自)的常规电流。4 超过钳位电压的持续电压可能会对 IC 造成永久性损坏。5 脉冲持续时间在 V PULLUP / 2 的阈值处测量。6 工作频率(反向旋转)和工作频率(无方向脉冲)的最大值由输出脉冲的令人满意的分离决定:V OUT(HIGH) 为 t w(FWD)(最小值)。如果客户能够解决较短的高状态持续时间,则最大 f FWD 、f REV 和 f ND 可能会增加。7 如果在信号变化事件期间或之后未保持最小信号相位分离,则输出可能会消隐或出现无方向脉冲。通电期间的信号变化事件可能会增加获得正确方向脉冲所需的边沿数量。8 通电频率 ≤ 200 Hz。更高的通电频率可能需要更多的输入磁循环,直到实现定向输出脉冲。

对高速旋翼空气力学的基本理解......
1.1 复合直升机的示例.......................................................................................................................................................3 1.2 倾转旋翼飞机的示例.......................................................................................................................................................3 1.3 前飞对后飞桨叶速度的影响.......................................................................................................................4 1.4 同轴反向旋转旋翼能够在前飞期间保持每个旋翼的升力不对称,每个旋翼的力矩相互抵消。通过消除后飞桨叶升力来平衡旋翼力矩的需要,可以缓解后飞桨叶失速,就像单旋翼飞行器一样(左图)[5]。................................................................ ..................................................................................................................................................................................4 1.5 兰利全尺寸风洞中的 PCA-2 转子试验装置 [11]。...9 1.6 采用悬臂转子配置的 Meyer 和 Falabella 风洞试验装置 [12]。......................................................................................................................................................................10 1.7 叶片表面压力端口的展向和弦向位置 [12]。11 1.8 零铰链偏移转子的轮毂组件,显示来自叶片的压力管连接到轮毂内的压力拾音器 [12]。 12 1.9 1965 年詹金斯在兰利全尺寸风洞中的试验装置 [13]。 14 1.10 高进速比时转子推力和 H 力系数与总距(A0)的关系,显示总距推力反转 [13]。 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19 1.13 在增加前进比的情况下,在盘面载荷恒定的情况下测得的有效旋翼升阻比 [16]。 . . . . . . . . . . . . . 21 1.14 升力对总距比和前进比的敏感度变化 [16]。 . . . . . 22 1.15 在 NASA 艾姆斯研究中心 40 x 80 英尺 NFAC 风洞中监测 UH-60A 空气载荷旋翼 [17]。 . . . . . . . . . . . . . . 24 1.16 压力传感器在仪表旋翼叶片上的分布 [17] 24 1.17 UH-60A 减速旋翼风洞试验中明显的集体推力反向趋势 [18]。 . ...
对高空旋翼空气力学的基本理解...
1.1 复合直升机示例。........................3 1.2 倾转旋翼飞机示例。。。。。。。。。。。。。。。。。。。。。。。。。3 1.3 前飞对后退叶片速度的影响。.........4 1.4 同轴反向旋转旋翼能够在前飞期间保持每个旋翼的升力不对称,每个旋翼的力矩相互抵消。通过消除后退叶片升力来平衡旋翼力矩的需要,可以缓解后退叶片失速,就像在单旋翼飞行器中一样(左图)[5]。..。。。。。。。。。。。。。。。。。。。。。。。。..4 1.5 兰利全尺寸风洞中的 PCA-2 转子测试装置 [11]。.9 1.6 带有悬臂转子配置的 Meyer 和 Falabella 风洞测试装置 [12]。.............................10 1.7 叶片表面压力端口的展向和弦向位置 [12]。11 1.8 零铰链偏移转子的轮毂组件,显示来自叶片的压力管连接到轮毂内的压力拾取器 [12]。.12 1.9 1965 年詹金斯在兰利全尺寸风洞中的测试装置 [13]。.14 1.10 高前进比时转子推力和 H 力系数与总距 (A0) 的关系,显示总距推力反转 [13]。..........15 1.11 反向速度转子风洞模型中使用的“可逆”翼型截面轮廓 [16]。.........................18 1.12 为反向速度转子风洞模型开发的每转两个斜盘 [16]。.。。。。。。。。。。。。。。。。。。。。。。。。...19 1.13 在恒定盘面载荷下测量的有效转子升阻比,以提高前进比 [16]。.......................21 1.14 升力对总距比与前进比的敏感度变化 [16]。....22 1.15 位于 NASA 艾姆斯研究中心 40 x 80 英尺 NFAC 风洞中的仪表化 UH-60A 空气负载旋翼 [17]。...。。。。。。。。。。。。。。。。。。。。。。24 1.16 压力传感器在仪表旋翼叶片上的分布 [17] 24 1.17 UH-60A 减速旋翼风洞试验中明显的集体推力反向趋势 [18]。...................................26 1.18 不同推进比下的升阻比与升力零和正 4 度轴,40% NR [18]。。。。。。。。。。。。。。。。。。。。。。。27