XiaoMi-AI文件搜索系统
World File Search System反应时间

神经系统 - Edexcel 生物学 GCSE
一位科学家想测试长时间使用电脑是否会影响反应时间。科学家在相同的环境条件下测试了 10 个人的反应时间。然后这些人使用电脑三个小时。科学家再次测试他们的反应时间。请给出三种方法,科学家可以改进这种方法以确定长时间使用电脑是否会影响反应时间。

引用本文为:Yildiz R、Ozden AV、Nisanci OS、Yildiz Kizkin Z、Cansu Demirkiran B. 经皮耳迷走神经刺激的效果
对最长正确答案、正确答案数、反应时间和疲劳变量进行了组内前测比较和组间比较(表2)。结果显示,实验组前测后测比较中,最长正确答案、正确答案数和反应时间变量存在统计学差异(p<0.05),疲劳变量差异不显著(p>0.05)。对照组前测后测比较中,反应时间变量存在统计学差异(p<0.05),最长正确答案、正确答案数和疲劳变量差异不显著(p>0.05)。实验组与对照组比较中,最长正确答案和正确答案数存在统计学差异(p<0.05),反应时间和疲劳变量差异不显著(p>0.05)。

晚期ADHD的神经认知标记
背景:对“晚发”注意力/多动症(ADHD)的兴趣增加,指的是12岁以后的临床上显着的ADHD症状的发作。这项研究旨在检查是否会因其儿童时期的神经认知功能与稳定的未受影响的兄弟姐妹区分开。Methods: We report findings from a 6-year prospective, longitudinal study of the Dutch part of the International Multicenter ADHD Genetics (IMAGE) study, including individuals with childhood-onset (persistent) ADHD ( n = 193), their siblings with late-onset ADHD ( n = 34), their stable unaffected siblings ( n = 111) and healthy controls ( n = 186).在研究条目中(平均年龄:11.3)和随访(平均年龄:17.01),通过结构化精神病学访谈和多信息问卷对参与者进行了ADHD的评估。在基线和6年后评估了几种神经认知功能,包括时间繁殖,定时变异性(反应时间可变性和时间生产变异性),反应时间速度,运动控制和工作记忆;智力被视为衡量整体神经认知功能的量度。结果:与健康对照相比,在基线和随访时显示出更长的反应时间和/或更高错误的反应时间和/或更高的错误率,与儿童发作性多动症的个体相似。它们与稳定的不受影响的兄弟姐妹(与健康对照相似)不同,基线时的反应时间可变性和定时生产变异性更大。对于任何任务,都没有发现时间交互的显着组。结论:对于患有多动症的个体的未受影响的兄弟姐妹,反应时间变异性和定时生产变异性可能是晚期ADHD的神经认知标记。关键字:晚期ADHD;未受影响的兄弟姐妹;神经认知标记。

视觉训练对...
摘要。本研究旨在使用两个反应时间测试(即全身反应时间(WBRT)和手指反应时间(FRT),使用两个反应时间测试来确定羽毛球运动员之间对反应时间的影响。这项准确的实验研究涉及30名羽毛球运动员(男性= 30,女性= 30)。该研究涉及两组[治疗组= 30,对照组= 30]。进行的描述性分析表明,前晶杆前测试的治疗组的反应时间水平为(M = 0.32,SD = 0.047),而前FRT检验为(M = 0.48,SD = 0.068)。对于组控制,Pre-WBRT检验为(M = 0.33,SD = 0.030),预进率测试为(M = 0.49,SD = 0.065)。另一方面,识别后测试的治疗组的反应时间为(M = 0.28,SD = 0.037),后结果测试为(M = 0.41,SD = 0.054)。同时,对于对照组,识别后的测试为(M = 0.32,SD = 0.037),后FRT测试为(M = 0.45,SD = 0.061)。此外,对于治疗组,识别前和后测试[t(29)= 8.813,p = .000]和FRT测试[t(29)= 10.329,p = .000]之间存在显着差异。至于对照组,在WBRT测试前和WBRT测试[T(29)= 3.786,P = .001]和FRT测试[T(29)= 4.935,P = .000]之间也存在显着差异。尽管如此,两个前晶杆前测试组[t(58)= 1.667,p = .101]和FRT测试组[t(58)= 0.546,p = .587]之间没有显着差异。但是,识别后测试组[t(58)= 4.676,p = .000]和FRT测试组[T(58)= 3.056,p = .003]都有显着差异。总体而言,这项研究可以帮助教练设计有效的培训计划,以帮助提高羽毛球运动员的反应时间水平。
白炽灯和 LED 刹车灯:反应时间的新颖分析
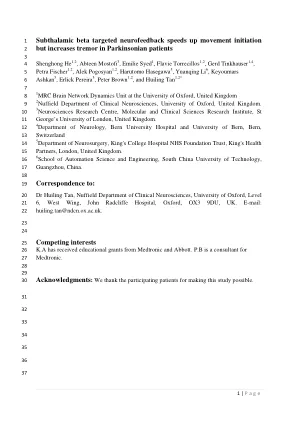
摘要 在英国,追尾碰撞占所有车辆事故的 8% 左右,而未注意到或对刹车灯信号做出反应是主要原因。同时,车辆上传统的白炽刹车灯正越来越多地被大量采用 LED 的设计所取代。在本文中,我们使用一种新方法在模拟环境中使用物理刹车灯组件记录受试者的反应时间来研究刹车灯设计的有效性。测量了 22 名受试者对 10 对 LED 和白炽灯刹车灯的反应时间。为每个受试者调查了三个事件,即刹车灯亮到油门松开的延迟时间(BrakeAcc)、油门松开到刹车踏板踩下的延迟时间(AccPdl)以及从灯亮到刹车踏板踩下的累积时间(BrakePdl)。据我们所知,这是第一项将反应时间分为 BrakeAcc 和 AccPdl 的研究。结果表明,与八个测试的 LED 灯相比,两个装有白炽灯泡的刹车灯导致反应时间明显变慢。BrakeAcc 结果还显示,经验丰富的受试者通过松开油门踏板对刹车灯的激活做出反应更快。有趣的是,分析还显示,刹车灯的类型会影响 AccPdl 时间,尽管经验丰富的受试者并不总是比没有经验的受试者反应更快。总体而言,研究发现,不同设计的刹车灯会显著影响驾驶员的反应时间。
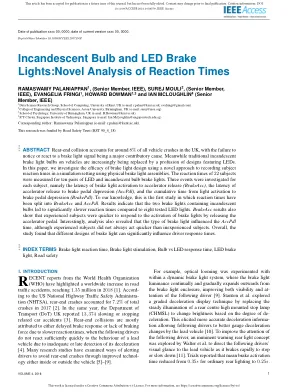
Hongwei Microelectronics
1。压力范围:300〜1100HPA(海拔9000m〜 -500m)。2。电源电压:5V 3。低功耗:标准模式6中的5μA。高精度:在低功率模式下,分辨率为0.06HPA(0.5米)7。高线性模式,分辨率为0.03hpa(0.25m)8。温度输出9。I2C通信模式10。 与温度补偿12. MSL 1反应时间:7.5ms 13。 备用电流:0.1μAI2C通信模式10。与温度补偿12.MSL 1反应时间:7.5ms 13。备用电流:0.1μA

情绪与集中注意力的表现之间的关联
引入集中注意力通常涉及在已知位置识别刺激。另一种类型的注意力,分类搜索涉及确定刺激的位置,其次是其识别。在选择反应时间任务中已经测量了这两种类型的注意力。[1,2]以及测量选择性注意力,这些任务还测量了关注的平均反应时间,误差和关注度(偶尔出现非常长的反应时间)。此外,它们测量了信息处理的阶段,例如新信息和响应组织的编码。[3]从这些任务中得出了三个主要注意力的指标。第一个措施是两个任务之间的差异(空间不确定性很少:SPUL)。第二个测量了注意力集中(Eriksen效应,Erik)。第三个在分类搜索任务中测量的,比较了在相同或不同位置在连续试验中发生的刺激的影响(位置重复效应,PREP)。

一天中的时间,速度折衷和新的编码
两个可能的位置之一。这些任务已用于研究由咖啡因,暴露于噪声和次要疾病等因素引起的激活状态变化的影响。[8,17] Broadbent等。[7]检查了一天中的时间对从这些任务得出的选择性注意度量的影响。eriksen效应是一种集中注意力的量度,下午较小,这表明当天晚些时候,注意力设置为广角。史密斯证实了这一结果。[16]下午在同一位置提出的刺激的反应更快,在下午也更大。本研究检查了这些选择反应时间任务中的速度误差权权衡,并且可以预测,当天晚些时候的性能会更快但准确。还检查了编码新信息的速度,并根据刺激的反应时间差异与先前试验(交替)和相同的反应时间(重复)不同。
AQA GCSE三部曲科学:如何成功!
•标量和矢量数量,接触和非接触力,重力,导致力,工作和能量传递,力和弹性,距离和位移,速度和位移,速度,速度,距离,距离时间图,加速度,牛顿的第一,第二和第三法律,力量,力量和制动 - 影响停止距离的距离,和反应时间和反应时间,较高的动量,仅(更高)(较高)(较高)(较高)(仅)6。波;