XiaoMi-AI文件搜索系统
World File Search System反馈信号


EPP3 高流量系列 G1、G2 电动气动压力...
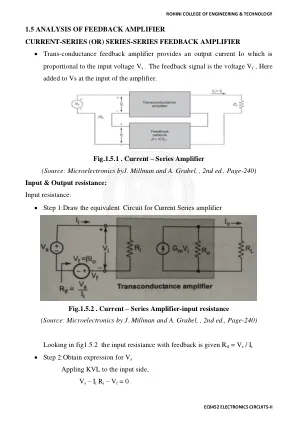
EPP3 - 高流量系列是一系列电动遥控气动压力调节器。EPP3 调节器允许根据电控制信号按比例调节出口压力。它包括一个集成的闭环电子控制和两个脉冲宽度调制的 2 通电磁阀。压力传感器测量出口压力并向差分放大器提供反馈信号。控制信号和反馈信号之间的任何差异都会转换为数字信号,以激励一个或另一个 2 通阀的线圈。然后立即对出口压力进行软校正,而不会过冲。模拟控制信号可以是电压 (0-10V) 或电流 (4 - 20 mA)。“填充阀”的入口直接连接到调节器的主入口 P。通电后,该阀门将增加出口 A 处的压力。“排气阀”通电后,出口 A 处的压力将降低。压力将通过位于盖子和主体之间的排放槽排出,并直接排入大气,无需消音器。主调节压力的排放将通过排气 R 进行。电磁阀确保伺服腔的填充或排空,以增加或减少调节器出口处的压力。在阀门的静止位置,所有端口都被阻塞。

EPP3 系列电动气动压力调节器
EPP3 系列是一系列带有闭环集成电子控制的电动遥控气动压力调节器。它可以根据电控制信号按比例调节出口压力。EPP3 调节器包括一个传统的伺服操作气动压力调节器,其中先导室由两个脉冲宽度调制的 2 通电磁阀中的一个或另一个供给。压力传感器测量调节器的出口压力并向放大器提供反馈信号。控制信号和反馈信号之间的任何差异都会转换为数字信号,以激励一个或另一个 2 通阀的线圈,以校正调节器的位置。控制信号可以是电压 (0 - 10V) 或电流 (4 - 20 mA)。“填充阀”的入口直接连接到调节器的主入口 P;通电后,该阀将填充伺服腔,以增加调节器出口 A 处的压力。当另一个“排气阀”通电时(调节器出口 A 处的压力降低),伺服腔的压力将通过位于盖子和主体之间的排放孔排出,并直接排入大气,无需消音器。主要调节压力的排放将通过快速排气 R 进行。建议使用传统消音器。两个电磁阀都确保伺服腔的填充或排空,以增加或减少调节器出口的压力。在阀门的静止位置,所有端口都被阻塞。
利用远程安装技术和数字化优化阀门性能和可靠性
远程安装位置检测器或远程检测单元 (RDU)(有时称为)可用于线性和部分回转执行器。它们的主要优势在于定位器的传感反馈部分与主控制外壳物理分离。控制器单元安装在一定距离之外,并通过电缆连接到位置检测系统,并通过一条或两条气动管线连接到执行器。传感单元检测阀杆的位置并将反馈信号传输到包含电子设备的外壳。

你为什么不点击:利用脑信号理解网页搜索中的非点击结果
网络搜索严重依赖点击行为作为性能评估和改进的重要反馈信号。传统上,点击通常被视为相关性或有用性的正隐式反馈信号,而非点击则被视为不相关或无用的信号。然而,在许多情况下,用户通过搜索引擎结果页面 (SERP) 上显示的内容满足了他们的信息需求。这就提出了衡量非点击结果的有用性并在这种情况下建模用户满意度的问题。长期以来,由于缺乏用户交互,理解非点击结果具有挑战性。近年来,神经影像技术的快速发展构成了搜索、娱乐和教育等各个行业的范式转变。因此,我们受益于这些技术并将其应用于弥合非点击情况下人类思维和外部搜索系统之间的差距。为此,我们分析了在不同有用性水平上检查非点击搜索结果之间的脑信号差异。受这些差异的启发,我们开展了监督学习任务,利用脑信号和常规信息(即内容和上下文因素)来估计非点击结果的有用性。此外,我们设计了两种重排序方法,即个性化方法 (PM) 和广义意图建模方法 (GIM),用于根据估计的有用性对搜索结果进行重排序。结果表明,利用脑信号来改进有用性估计是可行的
P2731 工作组的功能性 BCI 模型
摘要 脑机接口 (BCI) 可被视为一种利用思想和意图在人类和周围环境之间进行替代性交流的技术。该接口的结构由多个阶段组成,从获取脑信号开始,然后是几个处理阶段,最后产生反馈信号。BCI 系统的开发涉及多种专业知识,以便为持续创新创造独特的环境。然而,技术背景和专业知识的这种多样性可能会导致社区使用的术语混淆。因此,IEEE P2731 WG 的任务是开发一个功能模型,以便于理解 BCI 系统。在本文中,我们重点介绍属于 BCI 换能器级的功能元素的描述。
以并行或串行模式执行的高效功能性磁共振成像神经反馈训练中策略执行和反馈处理的大脑网络
神经反馈 (NF) 是一种复杂的学习场景,因为任务包括尝试心理策略,同时处理反馈信号,该反馈信号表示大脑区域被激活,需要自我调节并充当潜在的奖励信号。为了剖析这些子组件,我们在两种范式中获得了与有效自我调节相关的全脑网络:并行,其中任务是同时执行的,将反馈与策略执行相结合;串行,其中任务是连续执行的,将反馈处理与策略执行分开。20 名参与者在 2 周的 18 个疗程中尝试使用功能性磁共振成像 (fMRI) NF 控制他们的前中扣带皮层 (aMCC),使用认知和情感心理策略。我们分析了串行和并行范式中 aMCC 激活最大的 NF 训练运行中的全脑 fMRI 激活。串行范式中策略执行和反馈处理周期的相等长度允许以相等的功率描述两个任务子组件。得到的激活图与功能注释的内在连接脑图 (BM) 在空间上相关。平行条件下的大脑激活与基底神经节 (BG) 网络、扣带回-岛叶网络 (CON) 和额顶叶控制网络 (FPCN) 相关;串行策略执行条件下的大脑激活与默认模式网络 (DMN)、FPCN 和视觉处理网络相关;而串行反馈处理条件下的大脑激活主要与 CON、DMN 和 FPCN 相关。额外的比较表明,BG 激活是平行范式的特征,而超缘回 (SMG) 和颞上回 (STG) 激活是串行范式的特征。

量子相关的光子对源具有45 nm CMOS中的集成反馈控制
摘要ð集成光子学提供了有用的光子量子信息处理所需的可扩展性。许多光谐振器必须与相同的泵波长对齐,以产生驱动此类系统的量子相关光子对的来源,但是现有的解决方案依赖于手动对齐或基于外部光电二极管和块状块外芯片电子设备的手动对齐或离线调整,从而限制了可伸缩性。在这里,我们使用与标准的45 nm CMOS铸造工艺中的光子元素一起集成的电路对硅微林中的四波混合(刺激和自发)的反馈控制。载体扫描生成的反馈信号可在光子对生成方案中实现原位操作,这是一个关键的构建块,可实现大规模的CMOS量子量子 - 光片系统。
基于EEG脑电信号的双深度Q网络解码器...
摘要:脑机接口(BCI)利用神经活动作为控制信号,实现人脑与外部设备之间的直接通信,通过脑电图(EEG)捕捉大脑产生的电信号,将其转化为反映用户行为的神经意图,正确解码神经意图才能实现对外部设备的控制。基于强化学习的BCI增强解码器仅基于环境的反馈信号(奖励)完成任务,构建了从神经意图到适应变化环境的动作的动态映射通用框架。但使用传统的强化学习方法存在维数灾难、泛化能力差等挑战。因此,本文利用深度强化学习构建解码器以正确解码EEG信号,通过实验证明其可行性,并在具有高动态特性的运动成像(MI)EEG数据信号上展示其更强的泛化能力。