XiaoMi-AI文件搜索系统
World File Search System受扰

基于 DMP 的受扰场景下机器人与人类之间的反应式交接
摘要 交接看似简单,但需要双方共同协调,这通常在动态协作场景中发生。实际上,人类能够适应并响应其伙伴的运动,以确保在受到干扰或中断的情况下无缝交互。然而,关于机器人交接的文献通常考虑的是简单的场景。我们提出了一种基于动态运动原语的在线轨迹生成方法,以实现机器人在受干扰场景中的反应性行为。因此,机器人能够适应人类的运动(如果交接中断,机器人会停止,同时在伙伴轨迹受到轻微干扰的情况下继续前进)。进行定性分析,以证明所提出的控制器在不同参数设置和非反应性实现下的能力。该分析表明,具有反应性参数设置的控制器产生的机器人轨迹在受到干扰的情况下可以被视为更加协调。此外,我们还对参与者进行了一项随机试验,以验证该方法,方法是通过问卷调查评估受试者的感知,同时测量任务完成情况和机器人空闲时间。事实证明,我们的方法可以显著提高交互的主观感知,并且在分析的两组参数之一下,任务性能指标没有出现统计上显着的下降。本文代表了在交接任务中引入明确考虑扰动和中断的反应控制器的第一步。
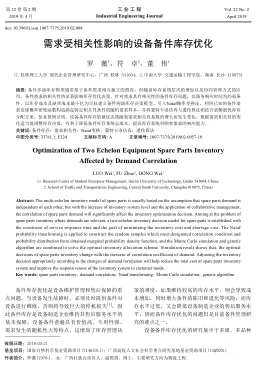
需求受相关性影响的设备备件库存优化 - 工业工程
摘要:备件多级库存模型通常建立在备件需求相互独立的假设基础上,但随着库存系统层次的提高和协同管理的应用,备件需求的相关性将显著影响库存优化决策。针对需求相关的备件库存问题,以服务响应时间为约束,以最小化库存成本和缺货成本为目标,建立了备件两级库存决策模型。利用Nataf概率变换,从得到的边际概率密度函数中构造满足指定相关性条件和概率分布的随机样本,结合蒙特卡洛模拟和遗传算法求解最优库存分配方案。仿真结果表明,备件库存最优决策随着需求相关系数的增大而发生变化。调整库存
2024(70)Nishina纪念奖得主
图2 :(顶)8 He + P→P + 4 He + 4n反应的示意图。 (培养基)使用此反应的RIBF实验设备。左侧的8 HE梁被入射,并与氢靶标反应,并使用由电磁体和一组探测器组成的武士光谱仪分析了生成的4和质子P。 (底部)获得的4个中子系统的能量光谱。水平轴E 4n是4-中子系统的能量,减去4-中子的质量总和。观察到峰(红线)显示了MEV的四脉,宽度γ= 1.75±0.22(统计)±0.30(标准)MEV。

调频发射机/接收机测试方法
显示 R 1 = 75Ω R a = 50Ω 的情况。 R 2・R 3:耦合电路的电阻 E:SG 输出电压 dBμ V 测试设备的输入信号电平:E-6 [dBμ V]

医疗保健领域对人工智能的接受度
3 另外,道具的展示顺序也是随机的。 4 由于10个项目中有4个被呈现,因此如果随机呈现,每个项目出现的次数可能会有所不同。因此,可以使用平衡的不完全区组设计(Louviere 和 Flynn,2010)来确保项目出现的频率相等。然而,由于本章的样本量非常大,达到 150,010(使用下面描述的计数方法),我们确定由于随机呈现而导致的出现次数差异很小。


大脑之间的串扰的最新进展 -
脑衍生的神经营养因子(BDNF)是大脑内的关键神经营养蛋白,通过选择性激活TRKB受体,对神经发育,突触可塑性,细胞完整性和神经网络动态产生多模式的影响。In parallel, glucocorticoids (GCs), vital steroid hormones, which are secreted by adrenal glands and rapidly diffused across the mammalian body (including the brain), activate two different groups of intracellular receptors, the mineralocorticoid and the glucocorticoid receptors, modulating a wide range of genomic, epigenomic and postgenomic events, also expressed in the神经组织,与神经发育,突触可塑性,细胞稳态,认知和情感处理有关。最近的研究证据表明,这两个主要的调节系统在各个层面上相互作用:它们具有共同的细胞内下游途径,GCS在某些条件下对BDNF的表达差异化,BDNF在某些条件下拮抗GC诱导的对长期增强的影响对长期增强对长期的影响,神经性出生和细胞死亡的影响,而GCS则在GCS进行了gccs interaneal and nistanal and and and and and and and and and and and and and and anfn。当前,BDNF-GC串扰特征主要在神经元中研究,尽管初始发现表明,对于其他脑细胞类型,例如星形胶质细胞,这种串扰可能同样重要。阐明BDNF-GC相互作用的精确神经生物学意义,以示波器方式进行,对于理解脑功能和功能障碍的微妙之处至关重要,对神经退行性和神经性衰弱和神经性疾病疾病,情绪疾病,情绪障碍,情绪和认知策略的影响至关重要。